After downgrading my firmware to PX4 v1.12.3 , I am having a huge relief …
a) The drone works well even with chopped off propellers which actually happened on
PX4 v1.13.3 .
b) The best think i like is the noise is very very less with the same chopped propellers. On PX4 v1.13.3, the noise from the props were very high. ( Strangely i see less noisy prop from the vibration graph of v1.13.3 )
c) It was extremely easy to handle the drone in all modes especially position mode. The take off and landing was so smooth that i didn’t touch the RC controls for the entire flight
( although i did some jerky shakes to test the integral response )
The same quadcopter config with PX4 v1.13.3 had me do fine tuning for hours with severe consequences or very less improvement and also where the drone tumbled over at one time. All the components remained the same for the demo test .
Therefore I have to conclude that I am prohibiting myself from flying the Quadcopter drone with v1.13.3 unless I see the same performance as with Px4 v1.12.3 . ( Awaiting for the v1.14.x )
To be confirmed, but I think we had more filtering enabled on the IMU itself in 1.12. We removed it to be able to control the whole digital filtering settings using IMU_GYRO_CUTOFF. This would explain why the raw data looks less noisy (it’s already filtered). However, setting the gyro cutoff correctly should give you the same behavior.
yes
This can’t be the only thing. Some screw might be loose.
Having clipping is usually a sign that something is resonating or rattling on the drone.
However, did you see any difference while flying with those settings?
@bresch
thank you for your feedback . my comments as follows Having clipping is resonating …on the drone.However, did you see any difference while flying with those settings?… "
**The drone doesn’t allow me to takeoff with accel clipping message . I do have a Herelink CUBE ORANGE QGC setup. " All the CBRK parameters have been disabled for bypassing safety .
This can’t be the only thing. Some screw might be loose. … I can assure you sir that the drone was tight enough for the entire flight setup. Also i did shake rigorously and tumble upside down manually with my hand to ensure nothin is loose !!
Currently i am on v1.12.3 i am really not in a confidence mode to go with v1.13.3 unless the Dev team assures me that they will help all the way . I also did not report here that fire broke out on one of the quad motors after fine tuning while it was in the air …( i am not joking !! ) That was with a new temporary motor that i used for flying awaiting OEM . It was working fine for 2 days @ 5 to 10 minutes running but on third day during flight, the incident happened. Can a 360KV motor( temp) along with 3 nos x 380KV motor create such a rush of current on the quad from the esc. I have replaced the motor with the 380KV and using the same escs. These are premium range Sunnysky escs and motors. ( my 500 flights with DJI M2PRO and Parrot Anafi Thermal never saw such an incident )
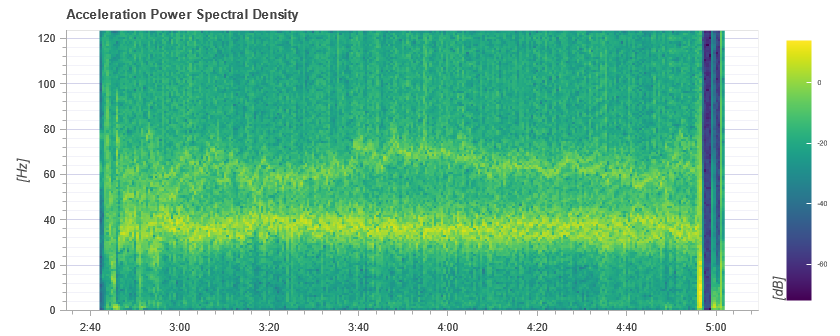
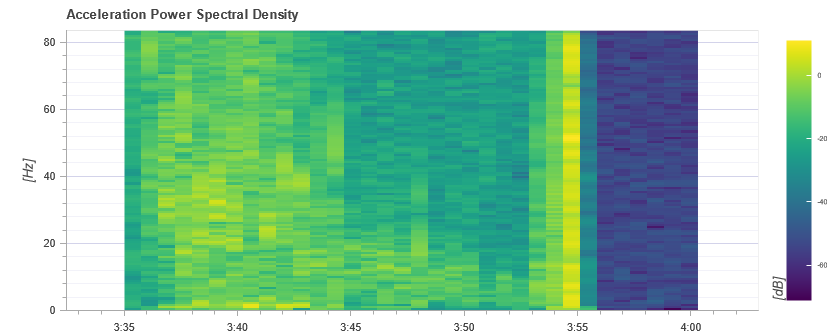
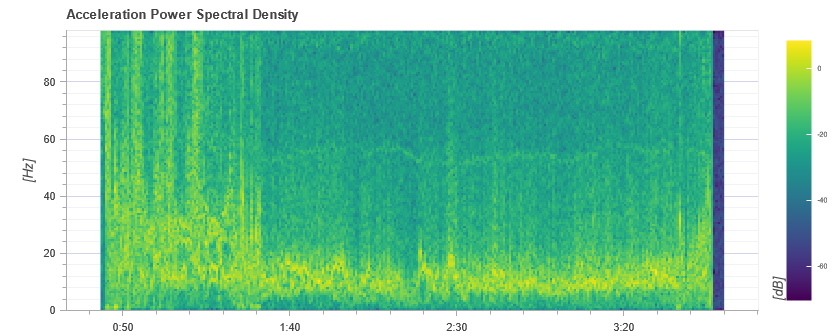
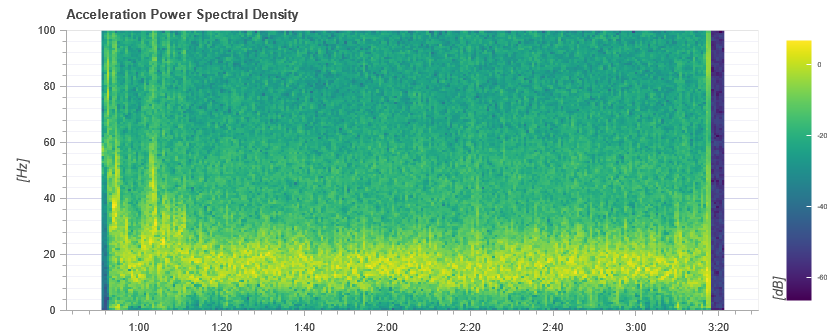
Today we did some testing as there were similar issues with accels clipping which occured after updating from v1.10.1 to v1.13 and did not occur anymore after downgrading back to v1.10.1.
For this, we used the same UAS (Holybro QAV250) with the setup being unchanged except the PX4 firmware. We tested with the firmware versions v1.10.1, v1.12.3, v1.13.3 and v1.14.0-beta2. Apart from observable changes in flight behavior and handling, differences between the firmware versions in terms of vibrations shift can be seen in the acceleration power spectral density plots provided below. Also, the power consumption changes noticeably (which is probably due to the changed flight behavior).
Right, you cannot arm if you have that message, but if you have it before arming, it means that the autopilot was hit by something.
Unfortunately I don’t have a cube orange to reproduce the issue.
I can’t give you an exact date for the official release (should be in the next weeks) but you can already test the release candidates (there will only be some minor changes between those and the official release) to see if it works better.
@bresch can you please advice whether it is possible to apply the filter settings from v1.12.3 to v1.13.3. Is there such a possible solution …i will try v1.14.beta2 and revert if there is any improvement
Edit4 : I can confirm that **PX4 v1.14.Beta2 does not work properly starting from take -off ** on a CUBE Orange - Herelink combination . The Quadcopter lifts from right side ( front & back) inspite after doing the calibration using PID tuning .
@sibujacob What is the size and weight of the drone. Do you maybe have a picture of it?
Given the high frequency vibrations, it could be that the D gain is sustaining them. You could reduce the IMU_DGYRO_CUTOFF to ~15Hz and maybe reduce the MC_ROLLRATE_D and MC_PITCHRATE_D.
Further to my test flight on V1.1.4.beta ( there is no indication that I am on a beta 2 . Can you verify this from my log file ) .
Procedure used to install Px4v1.14.beta2 is
1 Cloned the PX4 GIT MAIN repository using ubuntu PC terminal
2. Then diid the git submodules recursive and dist clean command
3. completed the MAKE CUBE orange( default) ( inside PX4-Autopilot folder)
4. completed the MAKE CUBE orange ( default) update successfully
log file ( final) - confident that drone can take off even though drone YAWS very slowly to left during take off ( reduced the MC_ROLLRATE_D and MC_PITCHRATE_D )
If you click on the git hash in the header information of Flight Review, you’ll see the last commit and the branch (v1.14.0 (beta) (e878d0c0)"). In your case it points to the main branch. This is really close to 1.14.beta2 but if you want to fly 1.14 exactly, you need to git checkout origin/release/1.14 and then you can re-do steps 2, 3 and 4.
Also, don’t forget to try to reduce IMU_DGYRO_CUTOFF to ~15Hz. You can also see if reducing IMU_GYRO_CUTOFF to 30Hz helps a bit.
@bresch
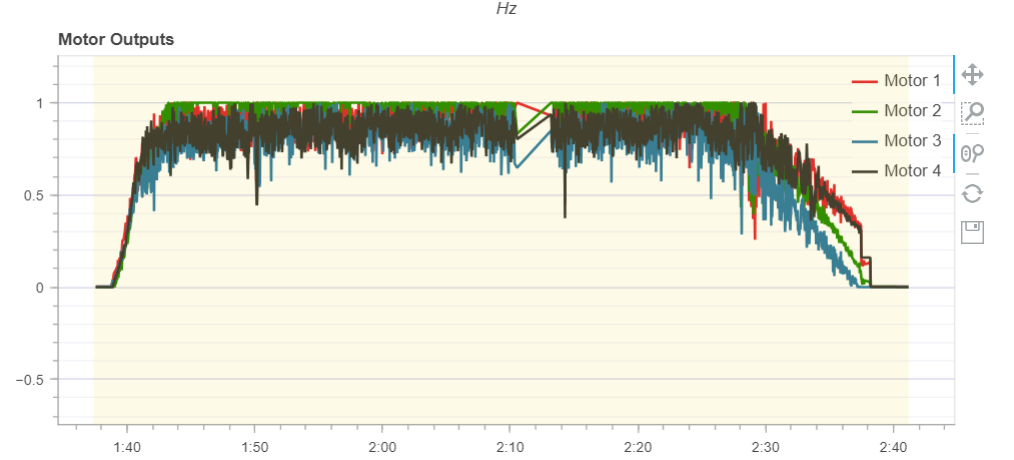
Further to my feedback in the previous post, I notice that the motor outputs operate at almost 100% throttle and therefore the power consumption is beyond earth !! The flight hardly lasts for more than 3 or 4 minutes. On the PX4 v 1.12.3 , i was getting minimum 20 minutes flight !! Did anyone report regarding high power consumption with the latest PX4 version release.
Attached the motor output graph from the previous stated log file
Good to see that it’s getting a bit better. The pitch axis looks good now but the roll axis is still a bit noisy and over-tuned; I think you could still reduce a bit the gains on the roll axis.
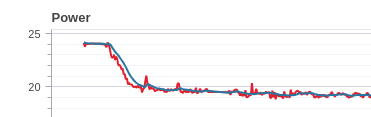
Regarding the flight time, one part might be caused by the noise on the motors being still a bit high, but it’s most likely due to the battery. You can see in the log that the battery voltage drops by 4-5 volts on takeoff. This means that it is struggling to send enough current to the motors. Since the voltage is low, the motor signal needs to be higher to run at the same RPM. Are you maybe using a battery with a lower C-rating than before? Is it really the same battery you’ve been using on 1.12?