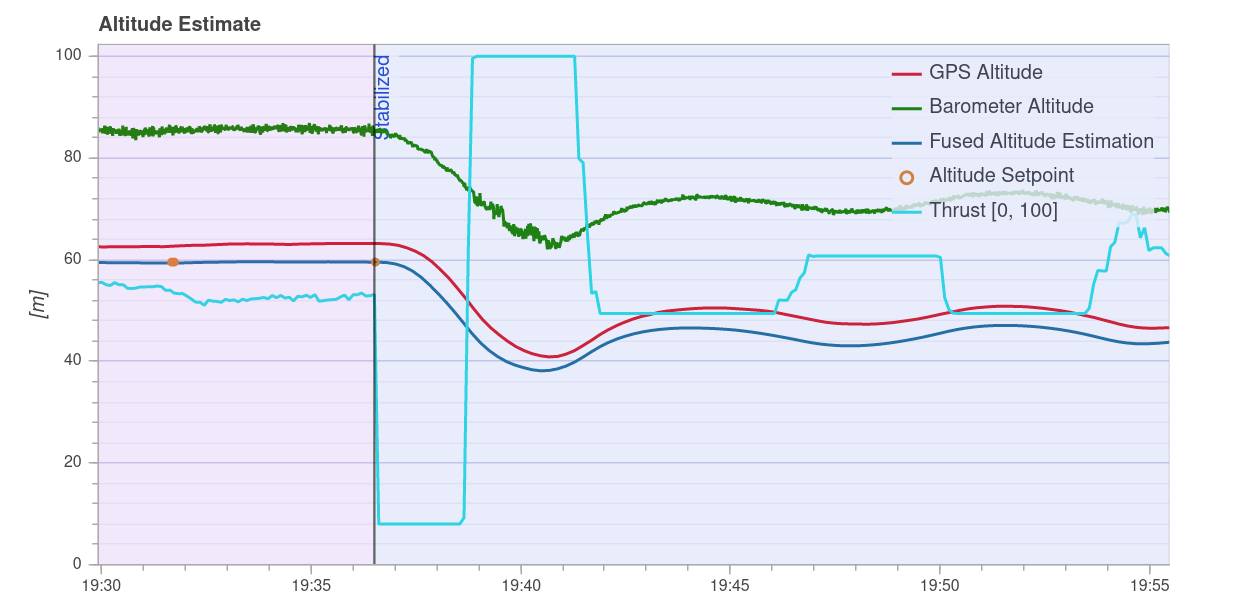
I was flying a quadcopter in mission mode and experienced a power loss for about 2,3 seconds. And dropped some altitude. After 2,3 seconds I was able to take the drone into manual control by the RC.
firmware v1.10.1 release. it’s not a customized firmware just stock.
From my analysis it looks like you had RC lost which made the system switch to stabilized mode with minimum throttle. Usually, when RC is lost, the RC lost action should be triggered and not stabilized mode, so that’s odd.
What RC receiver are you using and connected how?
Could you check if your RC loss is configured and working correctly?
Hi thanks for the analysis, i was using a herelink controller and reciever. At the place there were others flying model airplanes at 2.4 ghz. Could that interfere with the signal?
yeah i will look into it further on how i have configured the rc loss.
Thank you much for the explanation @JulianOes
Interference in the 2.4 GHz spectrum is always possible or to be expected. Often it can be tolerated and if not the RC failsafe should kick in correctly. However, you should never see “wrong” RC values as such in today’s digital transmission signals.
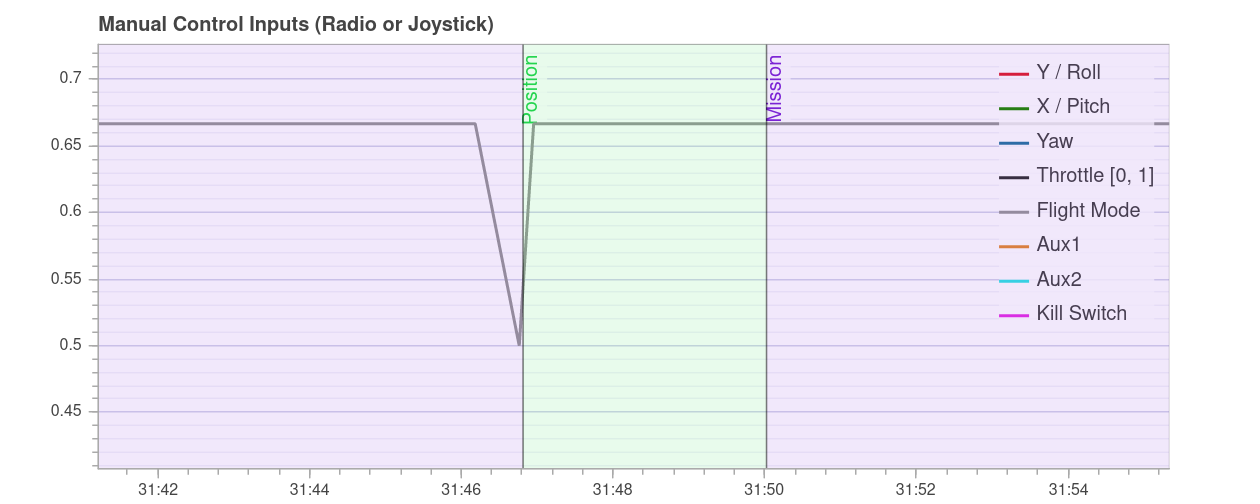
i did two test flights today, same thing happened in the middle of the flight, i had rc loss but it directly went to the position mode. unlike the other day i was flying in position mode before putting it to the mission. in the middle of the mission it went to the position mode after the RC loss failsafe triggered even when it is set to return mode.
i am quite little confused why this happened, because you asked me i made sure that the rc loss fail safe is set to return mode. @JulianOes if you got time could you give a peek at the log files. I’m kinda lost.
Have you tried if RC loss is correctly detected when you just on your bench switch RC off or walk far away with RC and shielded antenna? This should be the first step before flying again, I’d say.
You can see that your flight mod spikes for the very first RC loss somehow:
I think i made a workaround by tweaking the rc loss check duration to 1.5 seconds, is it fine or dangerous to tweak it that much? i’m getting expected behavior now. as you suggested i cut off the rc in the middle of a mission, and it performed return to launch as expected.
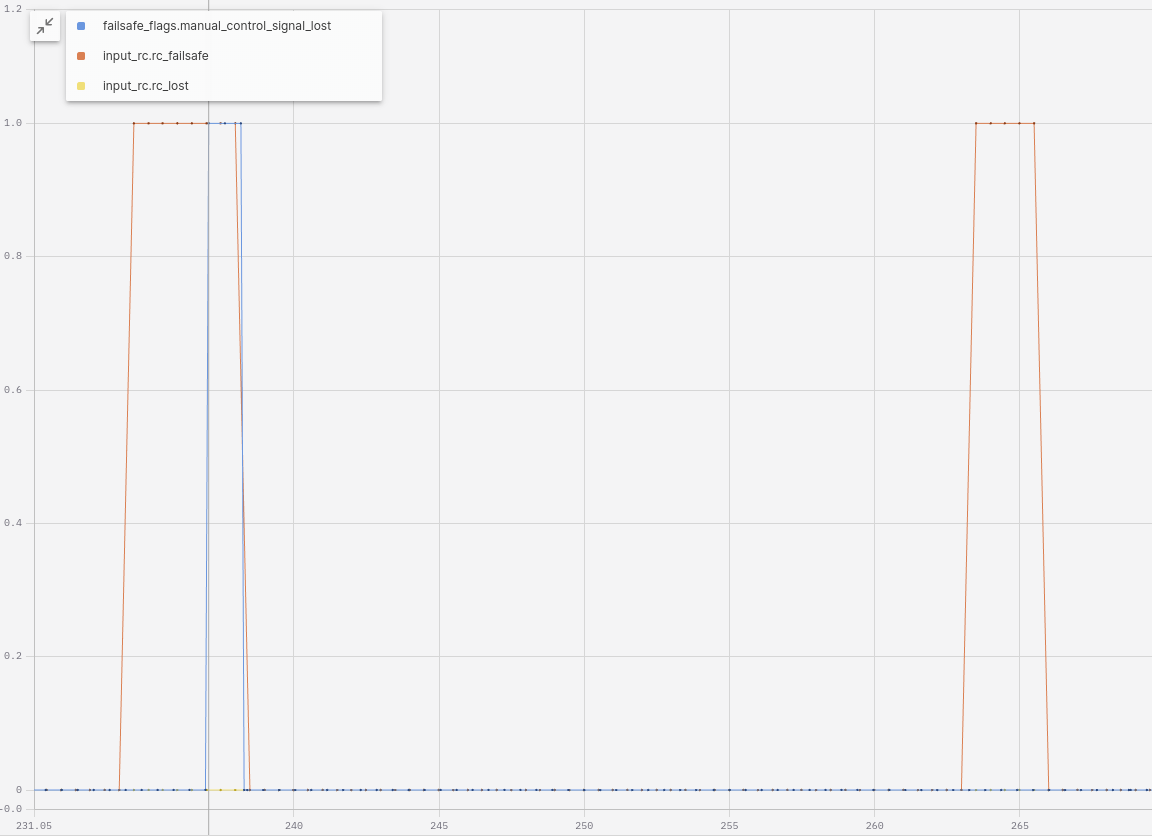
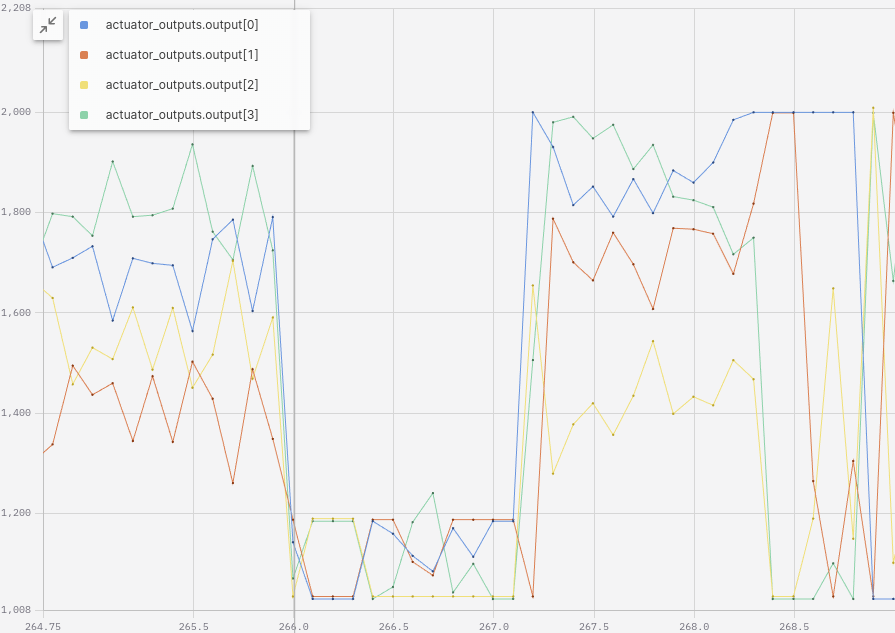
Recently, I was flying my quadcopter and I experienced the same problem as described above. I had two RC communication losses with the first one lasting 4.5s and the second one lasting 2.9s, as shown below (note that I changed the RC comm loss value [COM_RC_LOSS_T] from 0.5s to 3s).
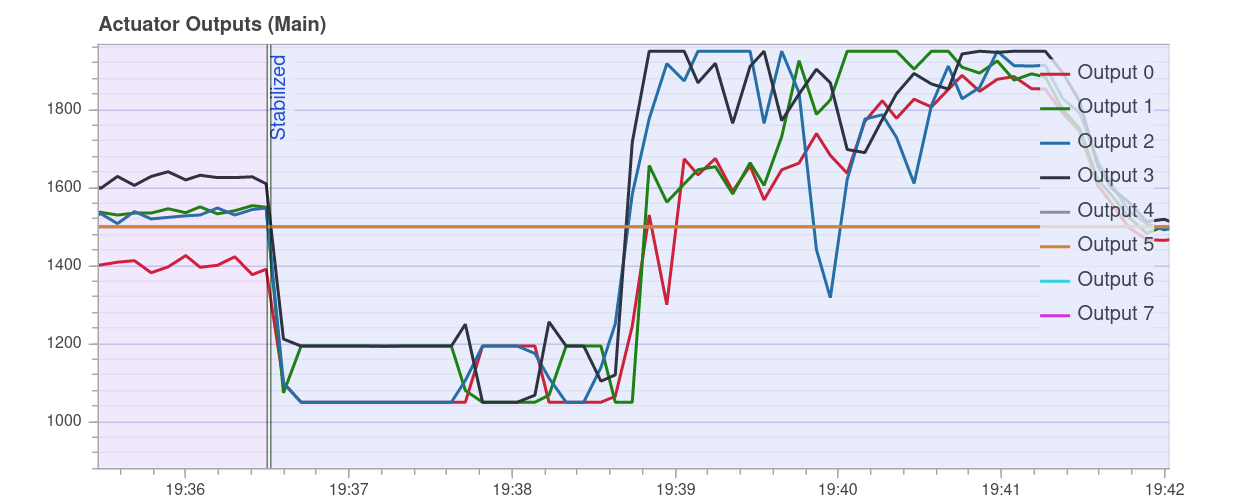
During the first comm loss, the drone behaved as expected; it hovered and then performed RTL. I decided to take over when the drone was doing the RTL and hence the mode changed from offboard to stabilized mode. While I was still flying the drone manually the second comm loss occurred, and right after I got the signal back, all the motors shut off for 1 second (current went to 0). The actuator output plot (shown below) looks pretty much identical to the one from @Yuthika_Sagarage:
Given that the behavior is so similar (comm loss followed by motor shutdown in stabilized mode), I was wondering if that may be a software bug? @JulianOes
What I can see is that throttle was all the way down during or after the second RC lost event. I wonder if that was actually the case, or if that’s a feature of your RC receiver or if it is a Pixhawk RC parsing error (which I doubt). Any hints what RC receiver you’re using and what settings, and have you tested how it behaves on RC loss?
Hi, First query : why did the drone switch to Stabilize mode. I have not seen a Px4 firmware switching the mode to Stabilized mode in any case from Mission mode or Auto mode. It should have switched to Altitude mode always ! Second query : Were you using Mavsdk or directly Mavlink in Offboard mode.
I’m using a Futaba 14SG transmitter and for the receiver, I’m using an R7008SB. I did not configure any failsafes on the transmitter side.
I haven’t been able to test how it behaves on RC loss yet as I’m still waiting on the parts to fix the drone. In the meantime, I did some tests to investigate the RC connection loss and it turns out that the only way I was able to raise the rc_failsafe flag, was by turning the RC off and on again. Obstructing the antennas or disconnecting the receiver did not trigger the RC failsafe flag.
@sibujacob
I deliberately put the drone into stabilized mode to fly it manually. I didn’t want to wait for the RTL but land it myself.
I was using MAVLink in Offboard mode.
The RC was not switched off mid air. The only thing that could have happened is that one battery cell voltage dropped, causing a brown out. That’s unlikely though given that the RC is pretty new
I have flown the drone dozens of times in stabilized mode. Flying the drone manually usually works perfectly fine
Interesting! In the docs I have never seen that MAVSDK is preferred over MAVROS. What’s the reason for that?
Fair enough, although V1.14 has been pretty reliable so far
@sibujacob Not sure where you have this info from. Let me just chime in here.
Not sure what you’re trying to say here. Switching off the transmitter is a common way to test RC failsafe. However, of course, I’d usually do it on the bench rather than in the air. And as OP said, that’s not what they did.
Again, not what OP was doing.
Never heard this before. While MAVSDK is always a good idea, but not necessary. Very confusing statement.
Irrelevant comment. v1.14 has been out there and flow for a while and is a valid choice for now. Sure updating is usually a good idea but ignoring the issue and just suggesting to try again with v1.15 is not really that helpful.
Hi,
Great feedback !
Did you change the log file since yesterday !! Or am I seeing something different. Yesterday i saw a logging duration somewhere 29 secs and today i am seeing a log file with duration 1:19
Point ! and Point 2 noted.
Point 3 - I didn’t see above you were using MAVROS. Mavlink is different from
MAVROS . MAVROS is ok with mavlink .
Point 4 - Px4 v1.14 from my experience with CUBE Orange F.c was bad . It doesn’t
mean it is bad for all the other fc models.