Currently, the maintainers are coordinating the upcoming v1.14 release (view the past meeting notes here), and has been releasing beta in the last few weeks.
We need your help to improve this beta release, thereby contributing to one of the world’s biggest open-source flight control software ecosystem! Now is the chance for you to contribute!
Why should you care?
You will contribute to the release of one of the world’s biggest open source autopilot system!
As an early-bird tester, you can try the features that don’t exist in v1.13 releases (listed below)
You will be sure that your vehicle/use case will work on the stable release (If you find a bug/weird behavior, we will do our best to fix it!)
Some of the awesome features you can try with this release
Natively supported dynamic control allocation (no more hassle with static mixer files)
Improved preflight check reporting (no more guessing on what is really wrong when the preflight check fails, you can read the error message directly in QGC!)
Improved Failsafe logic system
Improved follow-me mode (no more jittery and aggressive follow me. Try out the butter smooth follow me!)
How to help
All the report/discussion/up-to-date information will be shared through this issue:
Questions
If you have any questions about the procedure, feel free to drop them below. For questions arising from the actual flight test themselves, please post it in the issue.
Thank you to everyone who contributes by testing & keeps the community alive!
Thank you for the feedback. Y i have installed the v1.14.beta by first cloning the px4 master on my ubuntu pc and then using the specific cube orange board " make "setup. cmd. It has successfully done this process and uploaded without any errors. Also the flight log v1.14.beta 2 uploaded through anotther post .
The quadcopter doesn’t lift properly from take off. In fact whichever way i tune,from ground, it lifts simultaneously from right side ( front & back together) and tries to tumble over to left side.
I do not have any issues while i run with Px4 v1.12.3. It is smooth as butter and doesn’t require any tuning.
Also i see the “sampling Regularity of sensor data” graph is all over the place in v1.14.beta.x and just a straight horizontal line(may be micro values) on v1.12.3.
Is it required to erase the sdcard on the F.C before upgrading to new firmware or does it do this automatically.
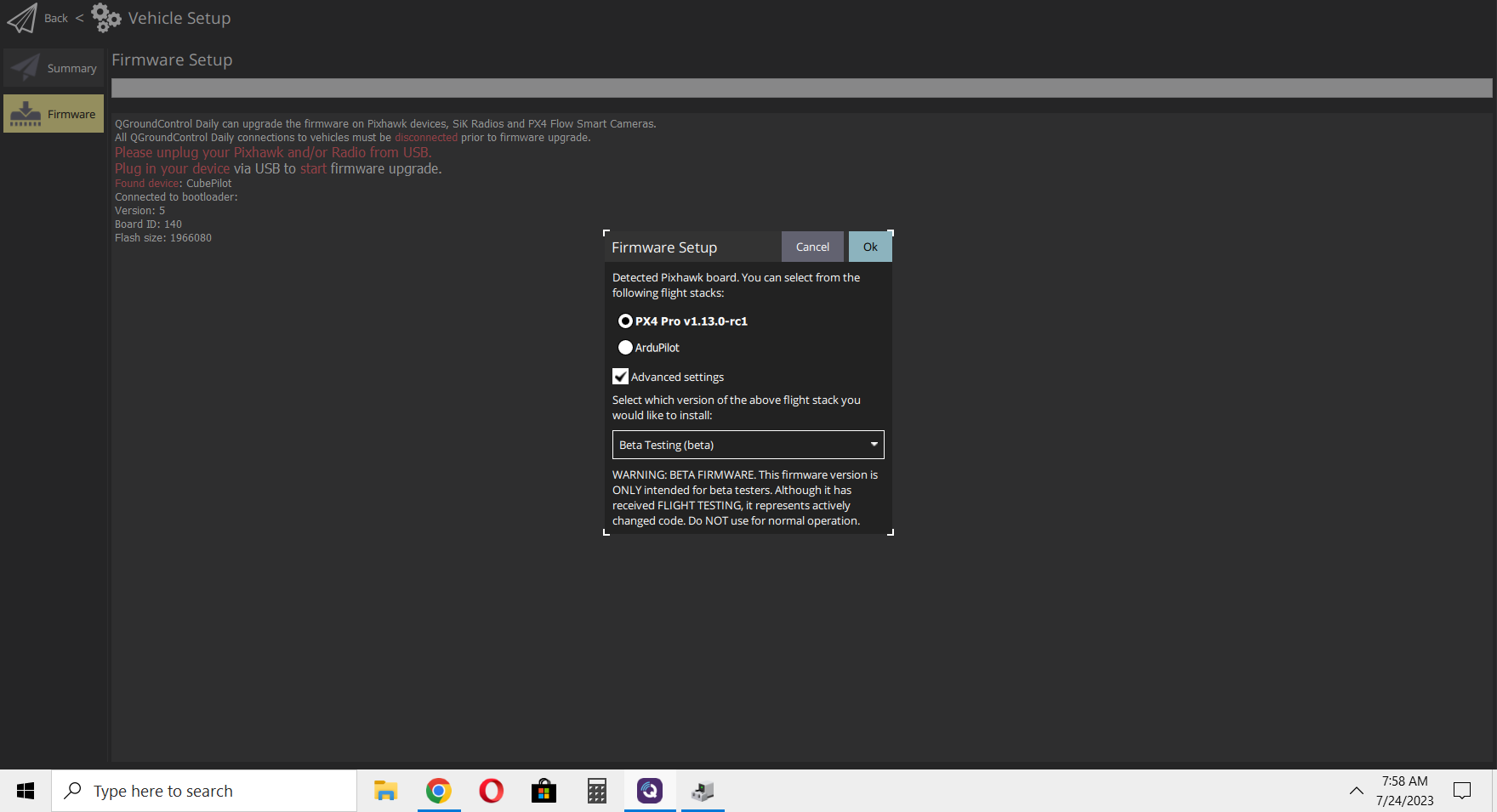
Why does my QGC ( daily build latest) show PX4PRO v1.13-rc1 while selecting the BETA TESTING (BETA)
 Why should you care?
Why should you care? Some of the awesome features you can try with this release
Some of the awesome features you can try with this release How to help
How to help