Thank you for the feedback. Y i have installed the v1.14.beta by first cloning the px4 master on my ubuntu pc and then using the specific cube orange board " make "setup. cmd. It has successfully done this process and uploaded without any errors. Also the flight log v1.14.beta 2 uploaded through anotther post .
The quadcopter doesn’t lift properly from take off. In fact whichever way i tune,from ground, it lifts simultaneously from right side ( front & back together) and tries to tumble over to left side.
I do not have any issues while i run with Px4 v1.12.3. It is smooth as butter and doesn’t require any tuning.
Also i see the “sampling Regularity of sensor data” graph is all over the place in v1.14.beta.x and just a straight horizontal line(may be micro values) on v1.12.3.
Is it required to erase the sdcard on the F.C before upgrading to new firmware or does it do this automatically.
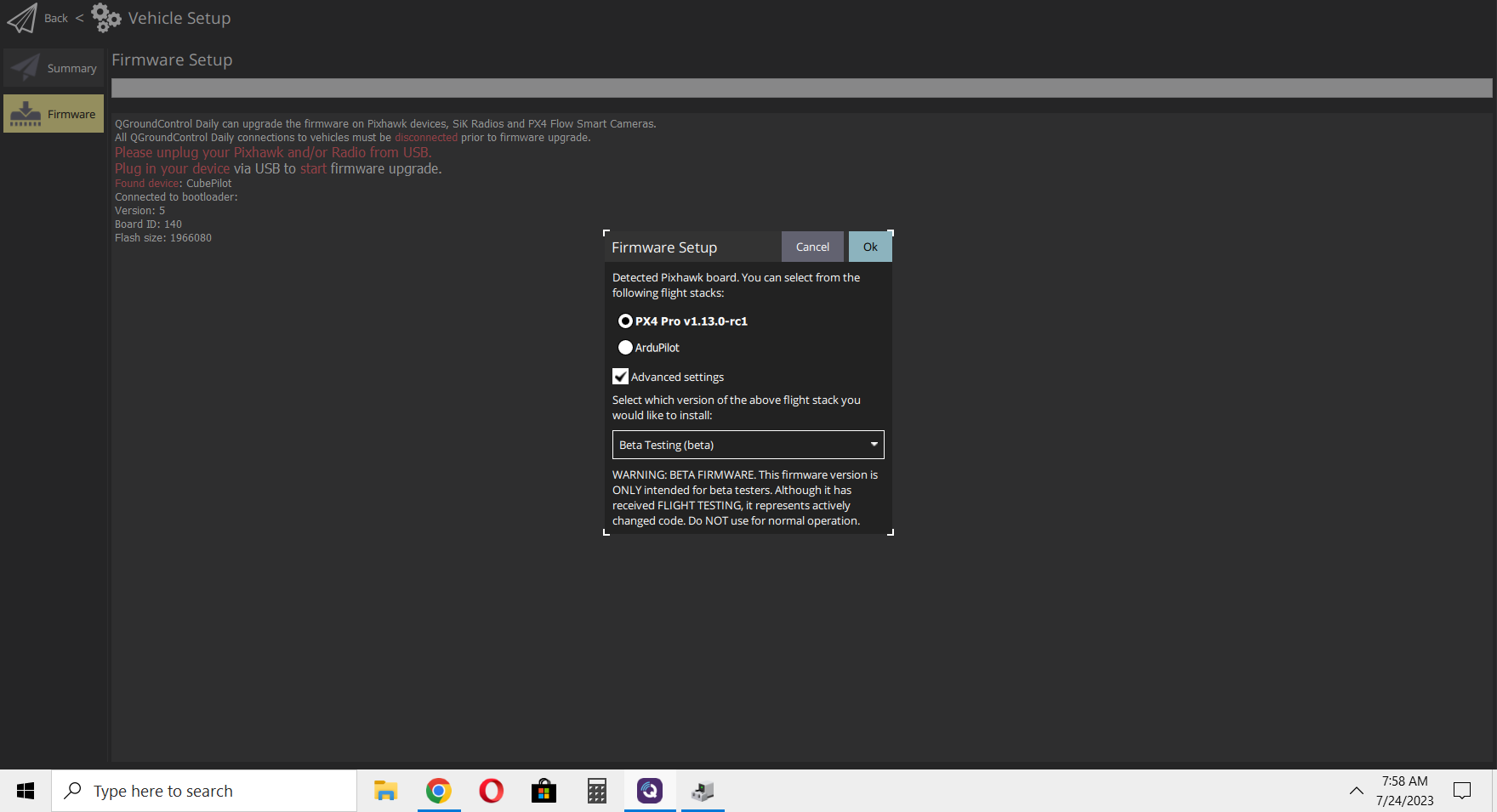
Why does my QGC ( daily build latest) show PX4PRO v1.13-rc1 while selecting the BETA TESTING (BETA)