@bresch
Thank you again for the feedback. The graph that you indicated here is almost the same while I was on PXv1.12.3 . Also the battery has not been changed either. The 18650 cells have a 8c capacity . While physically I checked the battery cell voltages, it has been drained !! it reached 3.6V per cell.
@bresch
Can you please advice what is the way to update the firmware to PX4 v1.14.BETA 2 . Does it have any improvements on the control algorithim used for the flight controllers or is it just a firmware update to enroll certain sensor drivers .
thank you
Ok…thank you…I just updated the firmware to PX4 v1.14-RC . Initial tests reveal a better take off and lesser current consumption even though the motor output graphs are showing full 100% .
**Edit - 1 ** PX4 v1.14-rc1 log file
I just got 10 minutes of flight time with your PWM settings. I might give a try using a higher pwm max value on all motors if there is any further improvement on flight time.
We also did some testing after reducing the IMU_DGYRO_CUTOFF and IMU_GYRO_CUTOFF to 20 Hz which improved the vibration issue but did not solve it completely. Also, formatting the SD card and reinstalling the v1.13 stable release did not lead to any improvements in vibrations or flight behavior. These things in combination with the fact that the vibration issues occur on different platforms (e.g. Cube Orange, Mini) I consider it to be a firmware related issue.
Yes, your feedback has helped me to understand my situation as well. I am not sure who is confirming the Orange Cube board running well on Px4 v1.13.x or v1.14.x
I tried on the v1.14-rc1 . It was stable initially but it consumed massive power that the drone flew only for 3 minutes compared to the 13 minutes flight time i had on the Px4 v1.12.3.
In the end i suppose we need to aid the dev team in providing our hard coded logs with real drone flight test rather than a simulator version to understand where the real issues are.
Also I am unable to understand what is a HITL version of Px4 SITL. My understanding was we could understand specific boards such as the CUBE better than a generic flight controller but it seems even that doesnt work !
From further development to the whole subject line , I was able to fly the QuadCopter with a PX4 v1.13.3 firmware , after tuning certain hardware including better isolation of cables using aluminum foil . The drone flew well including improved flight time and lower raw acceleration values and better FFT values ! Logs below for your understanding
I find this update very odd. IMU_GYRO_CUTOFF is applied after the EKF,
This only affects the angular velocity sent to the controllers, not the estimators.
while the filters on the IMU itself are obviously applied before the EKF. It means from v1.13 and v1.14 the EKF has to work with much more noisy signals.
I believe this explains the trouble of the users facing higher level of vibrations, and difficulty to make the vehicle fly properly.
I believe it would make sense to apply the filters before the EKF in future releases. @bresch what do you think?
[Edit] Also, since the noises are much higher, setting EKF2_GYR_NOISE = 0.1 rad/s and EKF2_ACC_NOISE = 1.0 m/s^2 (to their maximum value) gave me better results. Namely, less noise on the estimated roll, pitch, and yaw. Therefore better control performances.
in which the drone did quite well: several visibly perfect squares patterns in poshold mode and feels quite tightly tuned.
The plots look all over the place though, with the signature accels 0 and 1 vibrating harder than accel 2 and all three in the red.
Please see my params here: F450.params - Google Drive. The big changes I feel relevant here is that I applied IMU_DGYRO_CUTOFF = 15 and IMU_GYRO_CUTOFF = 30, and dropped MC_{ROLL, PITCH}RATE_D down to 0.0005.
Does it look like we have a mitigation strategy? Very low to zero MC_{ROLL, PITCH}RATE_D and MCP_XY_VEL_D_ACC, and reduced IMU_DGYRO_CUTOFF and IMU_GYRO_CUTOFF?
If this is the case, what should we say about the phenomena that vibration metrics are in the red and raw acceleration values exhibit violent oscillation? That they are normal and it has become our responsibility to tune the filters?
I will try to implement your input on my Pixhawk CUBE and revert back. But it will take at least 2 weeks before i can come up with the result…Currently my Dgyro_cutoff is @ 15 and imygryo_cutoff @ 20 …
I’m experiencing the same issue in version 1.13.3 where I can’t determine the cause of the noise. My IMU_DGYRO_CUTOFF is set to 16 and IMU_GYRO_CUTOFF is at 30Hz. The D terms for pitch rate and roll rate are both 0, and my EKF2_GYRO_NOISE parameter is set to 0.044. However, the noise becomes very pronounced, especially during windy conditions, and the flight appears to be unsafe. The flight log I shared above is from a flight conducted in windy conditions. If I can’t resolve this issue in any other way, I’ll try downgrading the version. But I’d prefer not to do that.
Hi,
I believe v13.3 is the most stable version out there except that ROS2 with UXRCE-DDS client option may not work as this is made to work from v14.0
At one time I have some how eliminated much of the noise by placing aluminum foils throughout the frame .But then again i get confused by the results above and therefore not sure whether to move to v14.0 or even v15.0 for that matter.
Hey all,
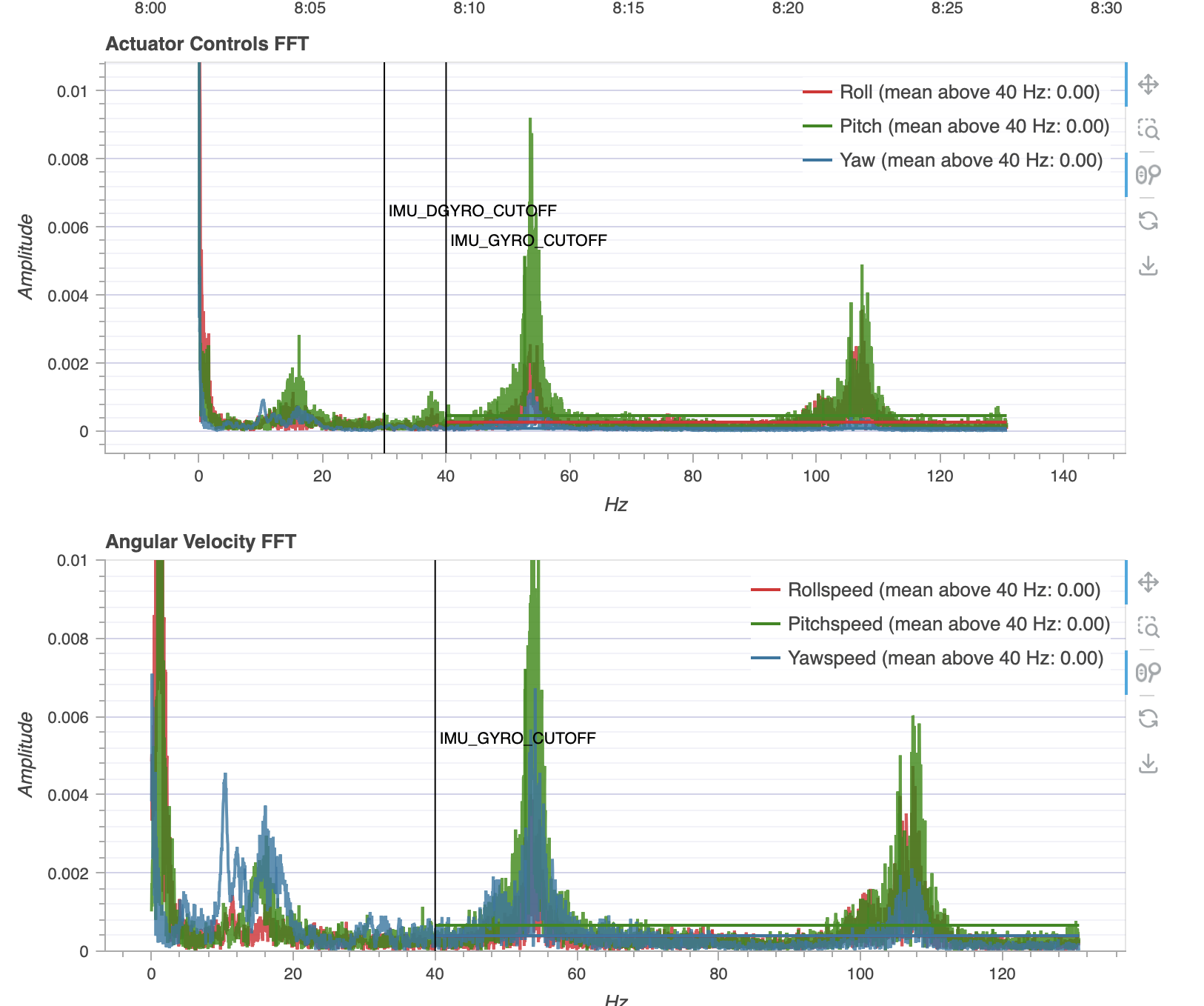
I dropped off this thread for a while because I moved over to Arducopter which didn’t have this vibration issue but I’m now back because I’ve built out a new system and need to use PX4 (V1.14). I just did some test flights with my news drone and I’m currently using the default tuning parameters for IMU_GYRO_CUTOFF (40 Hz) and IMU_DGYRO_CUTOFF (30Hz). My vibration levels looked high again on this new vehicle (Cube Orange+ hard mounted) so I turned on high rate logging and did a short flight. Logs below.
I have some peaks in the Actuator FFT and Ang Vel. FFT about the cutoffs. Everything on this vehicle is really tightly held down and nothing is loose. I do have long landing gear (0.5 m) that I think might bee the cause of the FFT peaks right below 20 Hz. I need those long gear for my payload. My first flight that showed high accel didn’t have that gear attached though, so I know my high level of vibe reported isn’t from the landing gear.
The vehicle seems to be flying okay, although I’ve notice a little shimmy/wiggle sometimes after or during control inputs. Seems like a lightly damped oscillation. Should I drop the cutoff freqs down as was suggested before? My drone is about 4.3 kg, so fairly large.
Any idea what is going on with those control FFT peaks and the ang vel FFT peaks? Could that be the propeller wash over the arms since there is a second peak at 2X the first peak? Should I be concerned by any of this?
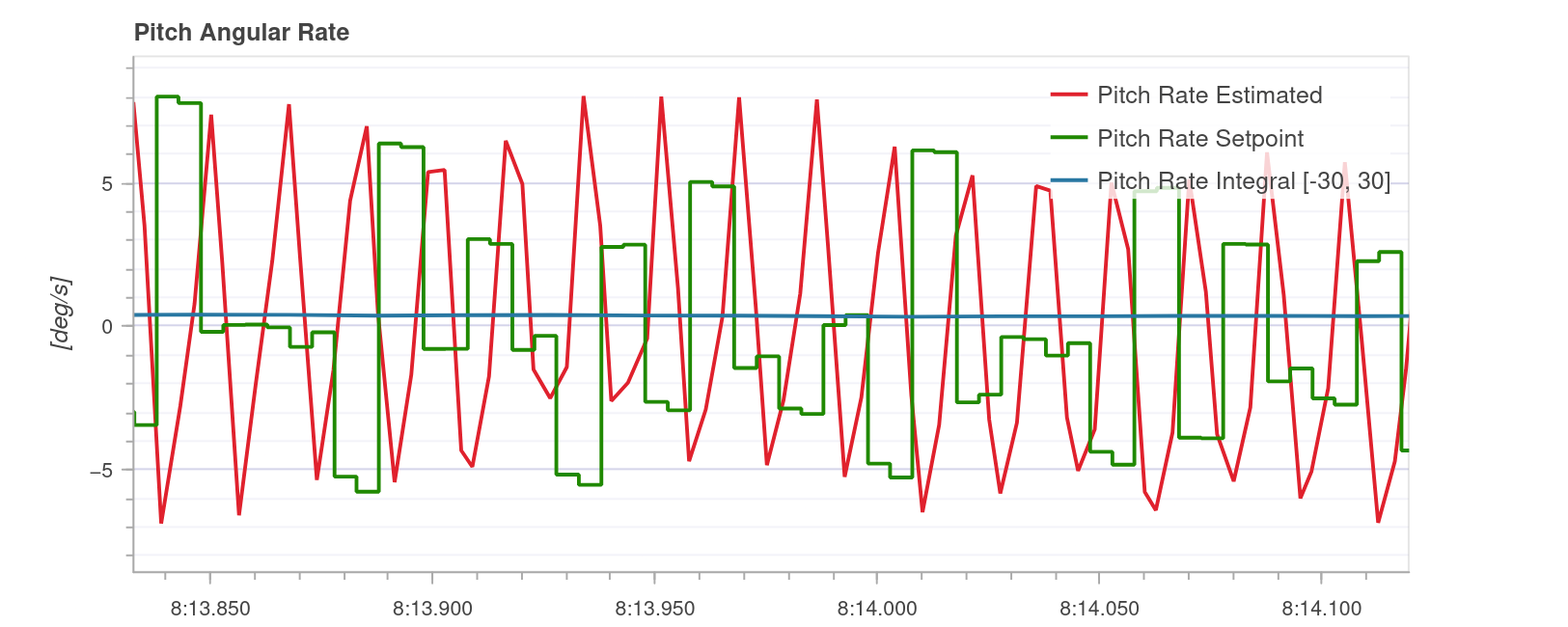
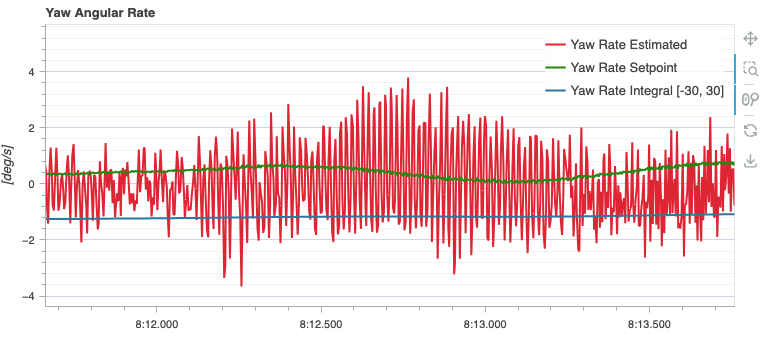
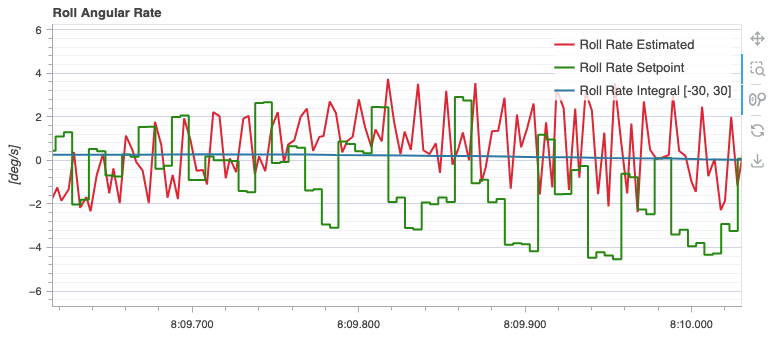
I don’t know how to determine if this is a control issue or the blade pass frequency. I am seeing the same oscillating rates in yaw and roll (see below) and in the roll, and pitch actuator controls. Is there a way to determine if the vibration is causing the flight controller to fluctuate the actuator input or the other way around?
Of these plots, it seems like the pitch oscillations are the largest.