The following result may be linked due to high raw accel vibration
a) No lift or barely just takes off from ground inspite of motor sliders indicating very good individual thrust availablity.
b) drone tilts over during take off or often shows very high oscillations.(ordered for a new SunnySky V4006 motor 380KV )
c) 3 step land detection phase misalignment. Drone unable to recognize landing causing props to run even after a fall.
d) Did the first ever phase of PiD tuning on PX4 v1.13.3 . This was done upto a point where i didn’t know whether I was human !!
i never ever did a tuning on my PX4 v1.12.x or PX4 v1.11.x which flew well at first instance !
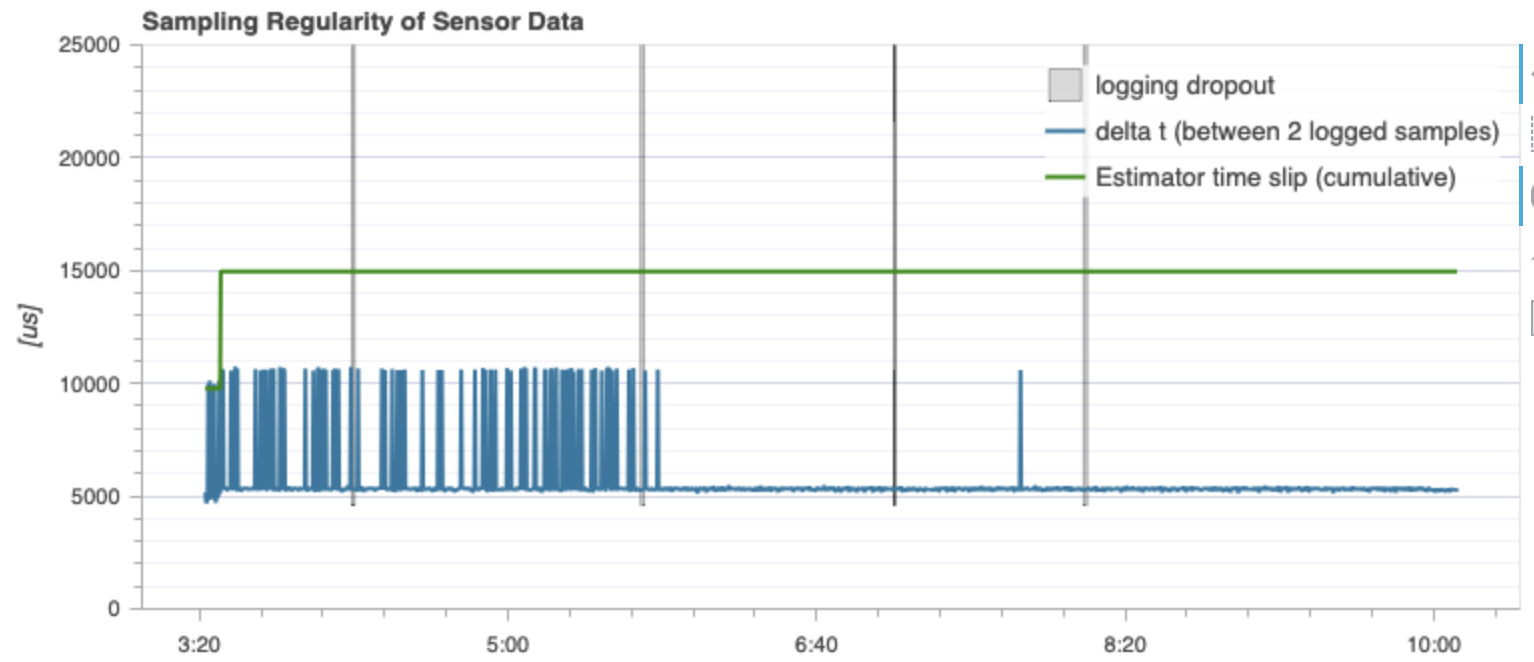
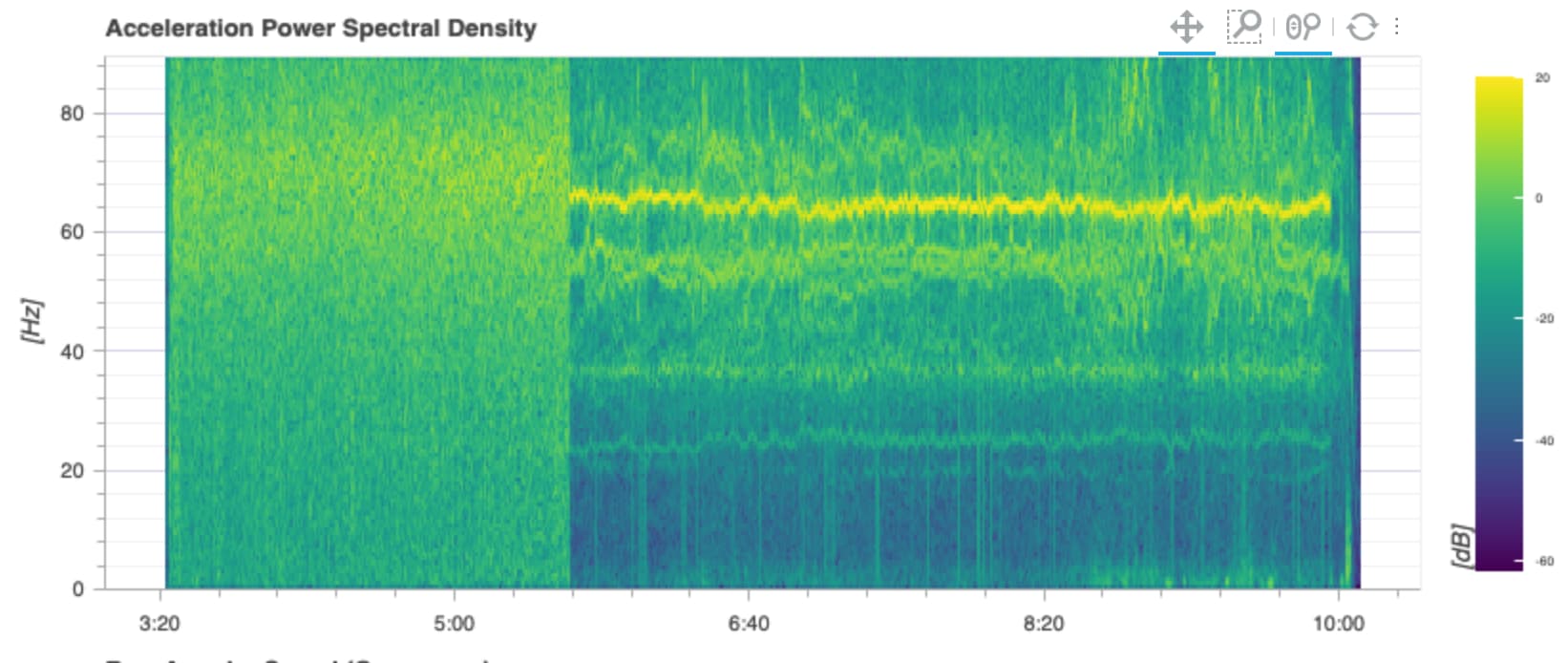
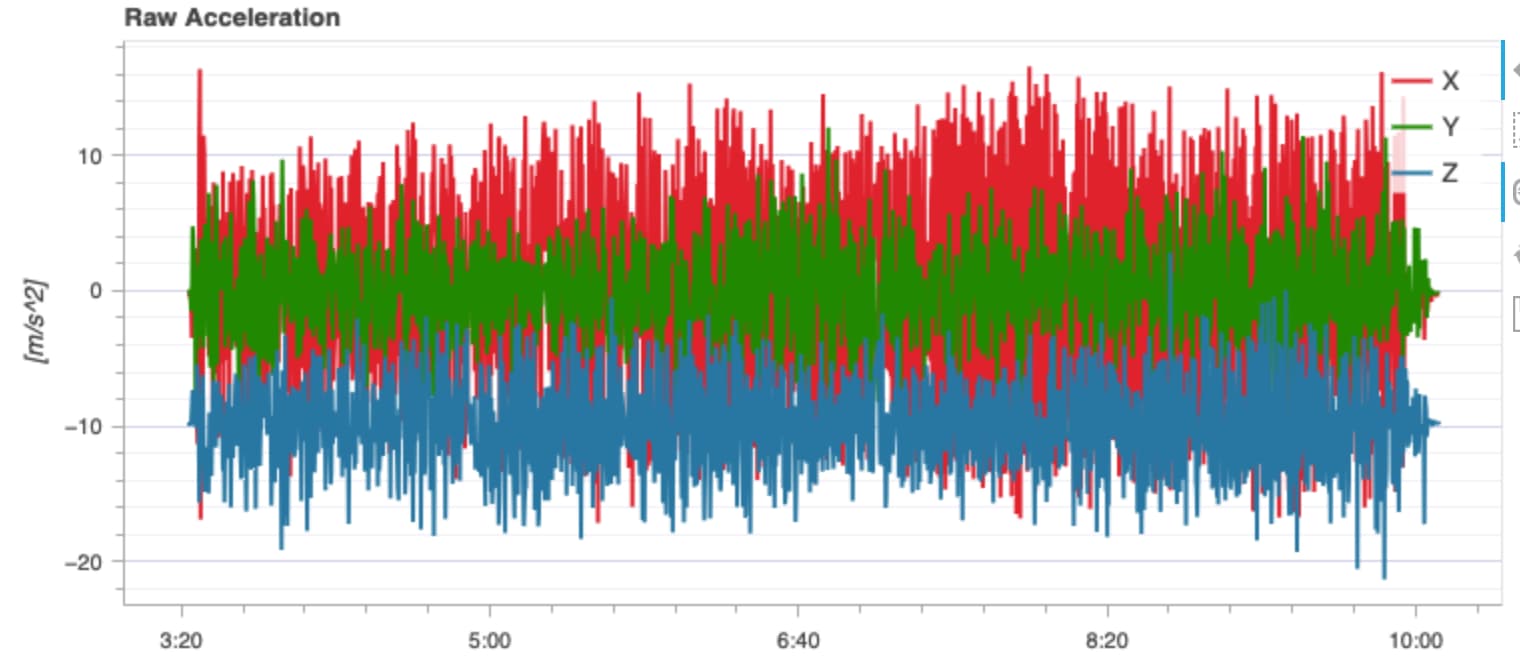
that my sampling regularity jumps around a lot. Here is an example from a flight a while back along with the accel PSD showing the improvement in the frequency resolution after the regularity stops jumping around. This is odd, but likely unrelated to the high accel magnitudes, which you can see in the bottom plot are quite high for this entire flight.
The raw acceleration looks same but on one instance , the vibration went all the way down to two or three and not 20 .But this i think was when the drone was not moving at all .
Hey, to the announcement of good comparison log files on the same hardware between firmware version 1.12.3 and 1.13. to generate, I can only tell you today that we did not succeed in downgrading to 1.12.3 (just like that) with the installed hardware. The copter provided for this offered so many construction sites after the downgrade, especially with the compass hardware. Unfortunately, these tests are still pending. Maybe we’ll change the test so that we don’t downgrade the firmware but swap the FC in the otherwise same Cube Orange copter hardware for a Holibro pixhawk 6x. And so compare the Raw Imu acceleration values against each other. The FC holder does not require any significant changes.
@sibujacob can you do a high-rate logging flight and post the log file so that @AlexKlimaj can review it? See above. I can’t get 1.14 installed right now because of an issue with the beta build.
Change your SDLOG_PROFILE to 4 to enable high rate logging.
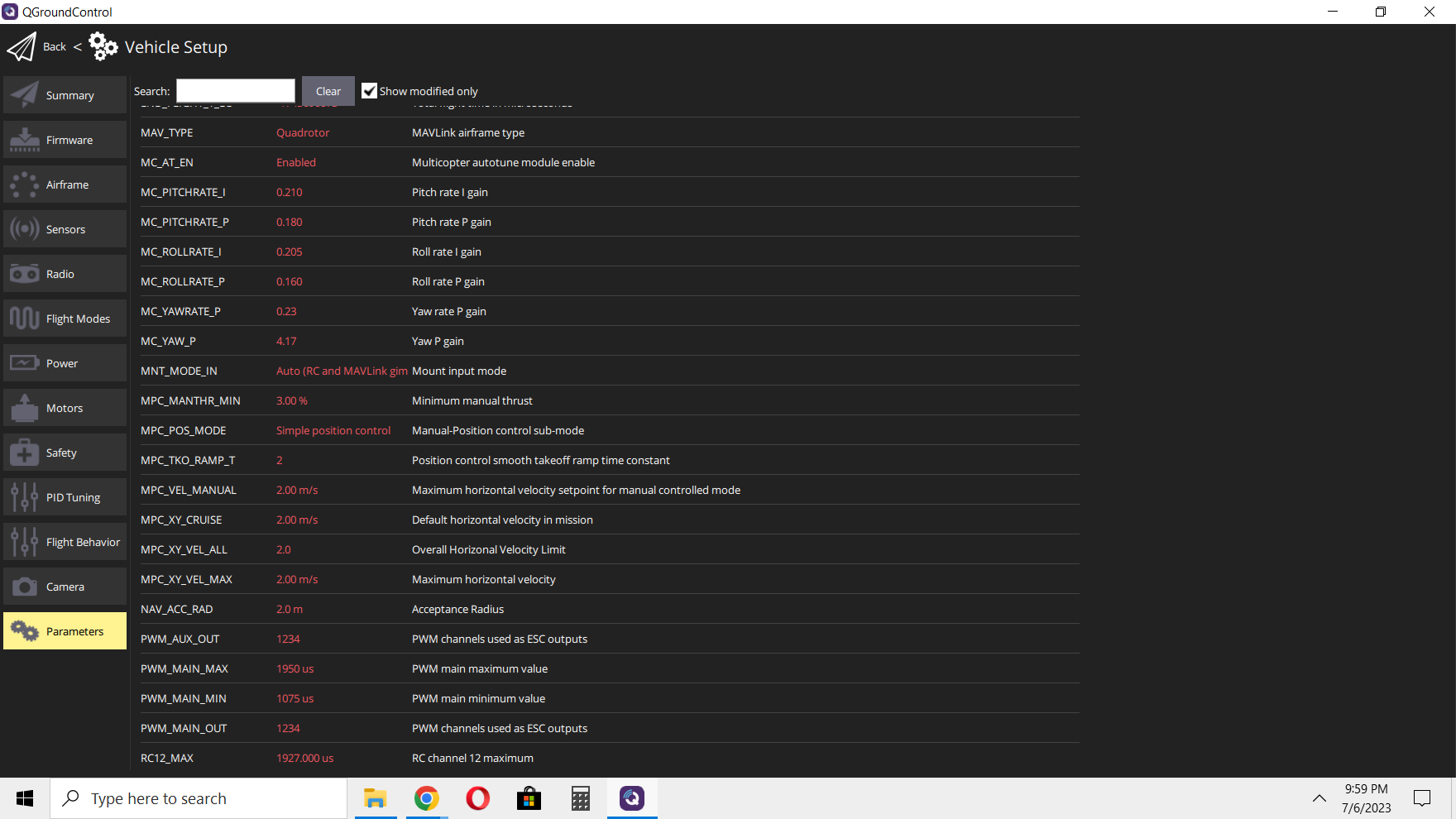
@mwshafer and @AlexKlimaj … here goes my Px4 logs for your understanding. PID tuning is not complete and appreciate any recommendations. This flight as of today
I had a 13 minutes flight time after the previous test demo ( PX4 v1.13.3 ) and surprisingly the drone flew well even in position mode without any much glitch …logs below
My observations are as follows
a) Never switch ON the drone and move around to your launching pad rather switch ON the
drone after you place the drone on the launching pad !!
b) There is a improvement on the RAW acceleration .
c) Vibration metrics seems the same high end !
d) The test was done at full battery capacity till it reached 7% warning .
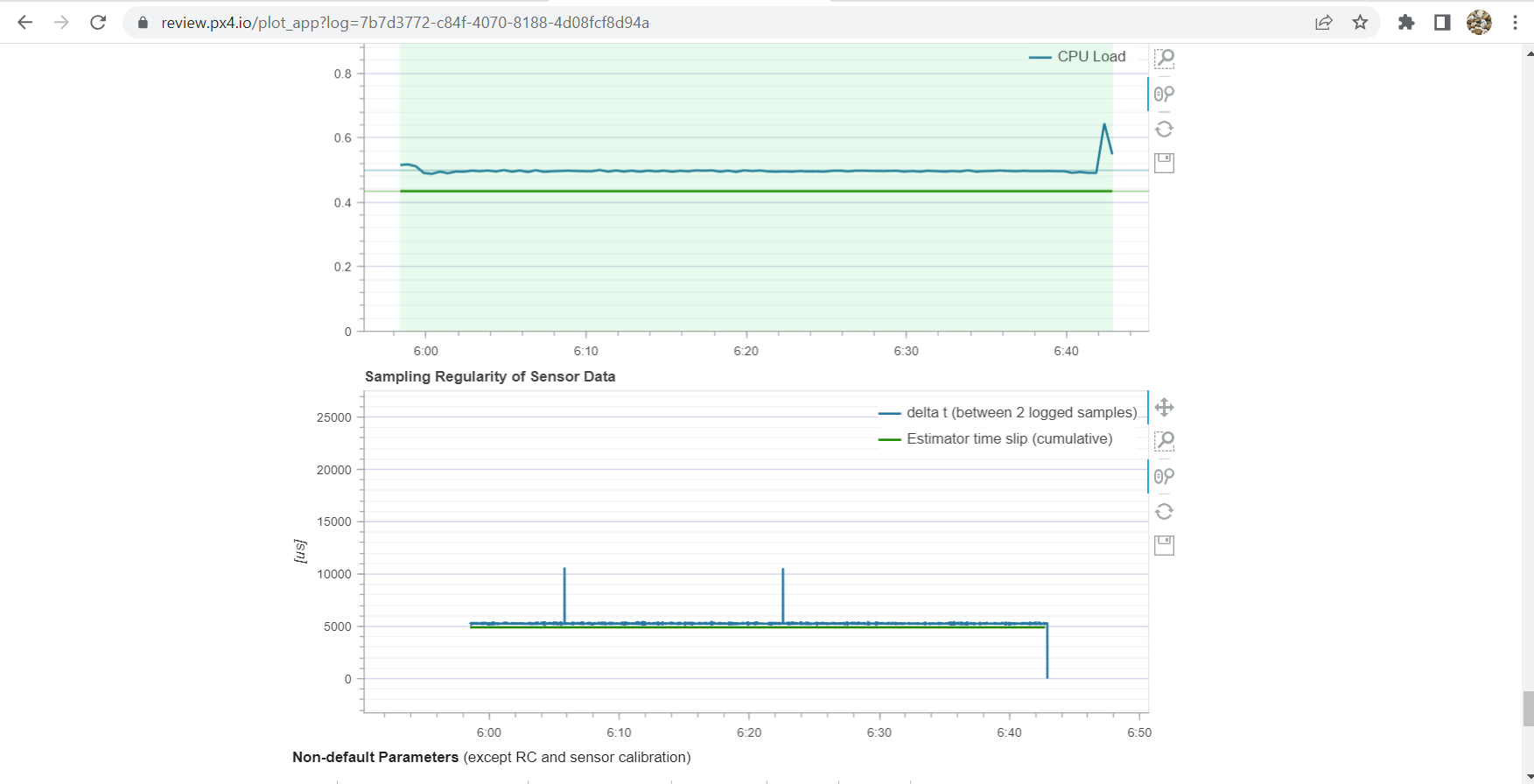
e) Sampling regularity of sensor data looks good. I have no idea how it became better !!
If there is some alien out there who could provide recommendations for a finer tuning , would be grateful .
Perhaps the IMU that isn’t vibration isolated (out of 3) was being used as primary IMU for EKF2. Could you all check on that?
Without access to the two logs with exact same vehicle configuration, but different PX4 version (v1.12 and v1.13), it would be hard to conclude that it’s a software problem (vibration metric alone isn’t definite clue, we would need to analyze actual IMU data)
@sibujacob could we have access to the two logs from v1.12 and v1.13 you had above?
Separate from that, Cube orange plus target was not available for v1.12, so we were wondering how that target binary was built for the test!
thank you for the feedback…mine is a Cube Orange since beginning… Px4v1.12.3 log review was placed earlier based on another flight demo back in Jan …
If you require a flight demo using Px4v1.12.3, i will downgrade the px4v1.13.3 currently installed but i am not sure if it can install anymore in the first place …will try to give it a shot today …
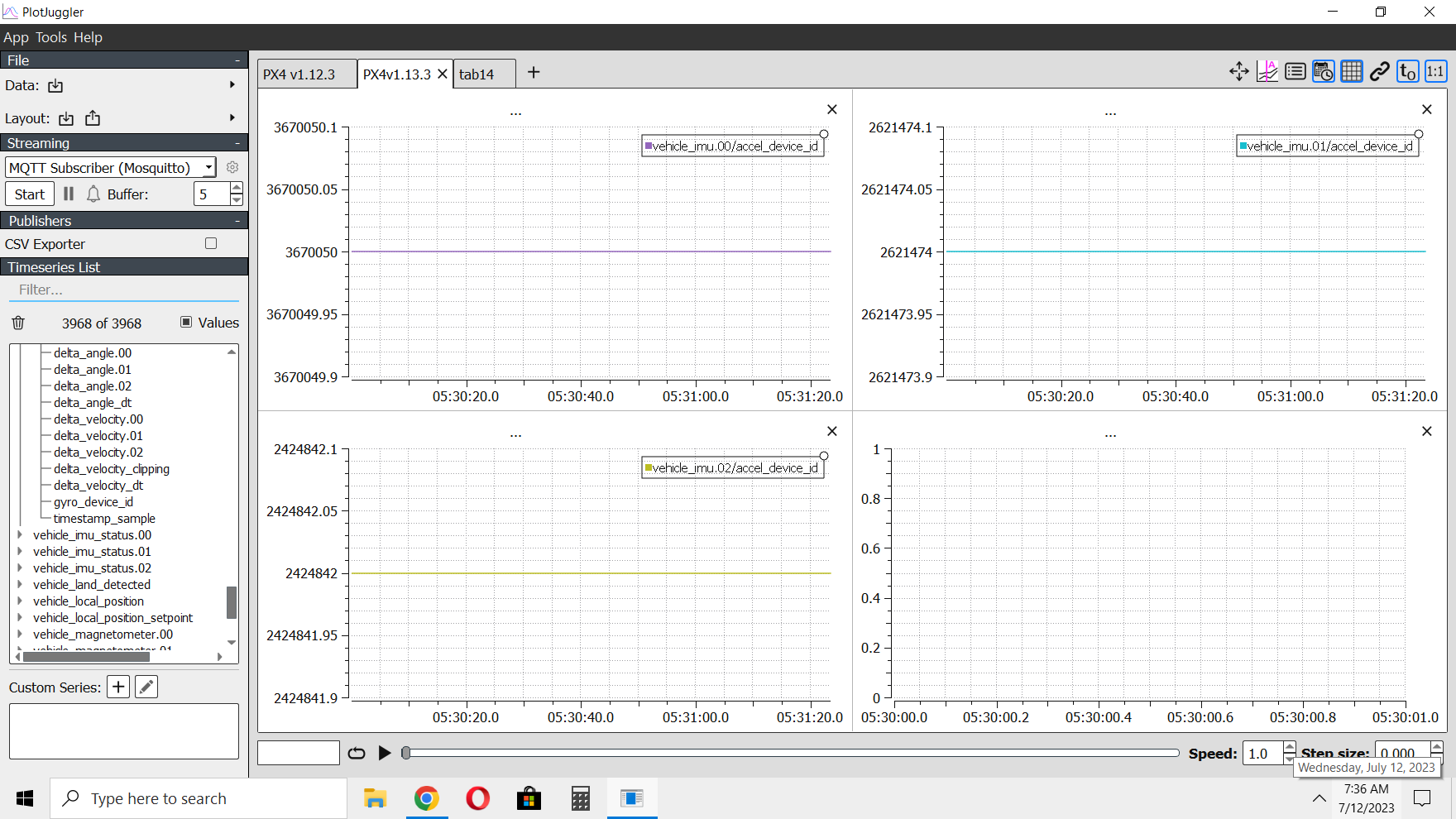
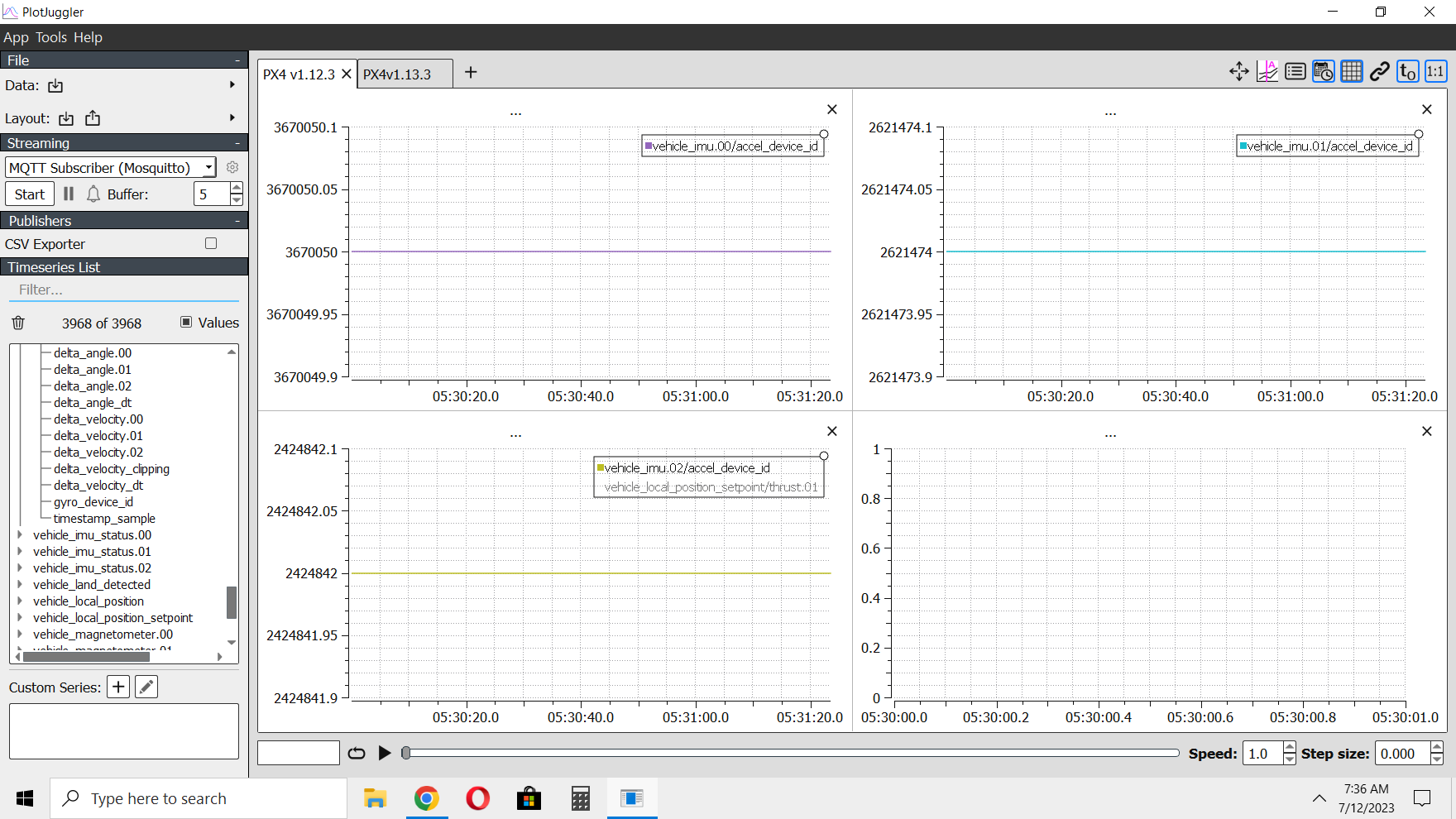
I used plot juggler instead to get the device ids of the imu by doing the following action
import data from two PX4 log files and checking the imu_device id graph. i hope this is correct. It looks the ids matched for both PX4 v1.12.3 and PX4 v1.13.3
I myself haven’t recently but I work with several clients that fly Cube Orange and/or Orange+.
I’m planning on test flying it again, I just need to mount it in my test quad again.
I had a look at the IMU sensors used in Pixhawk 6C, 6X, Cube Orange, and Cube Orange+. From a brief analysis it looks like the sensor drivers are mostly configured to:
high FIFO rate
max range (2000 or 4000 deg/s, and 16 G or 30 G, depending on sensor)
So given that I don’t expect a huge difference in logged vibrations between these.
Just for comparison, this is what the accel log looks like for Pixhawk 6C (with high rate and sensor comparison logging enabled). That’s mounted with the included 1mm double sided tape. It looks noisy but I believe that’s because we’re looking at unfiltered raw data. It’s flying smooth for me.
Hi…thank you for your feedback. In fact the only difference between those flights were that initially I carried the drone in my hand to the launching pad while it was switched ON . The second improved graph is while i placed the drone on the launching pad after charging and then switched ON the power !! I am also surprised by this findings but otherwise the batteries are in the same place locked and tight and did not remove for charging purposes…
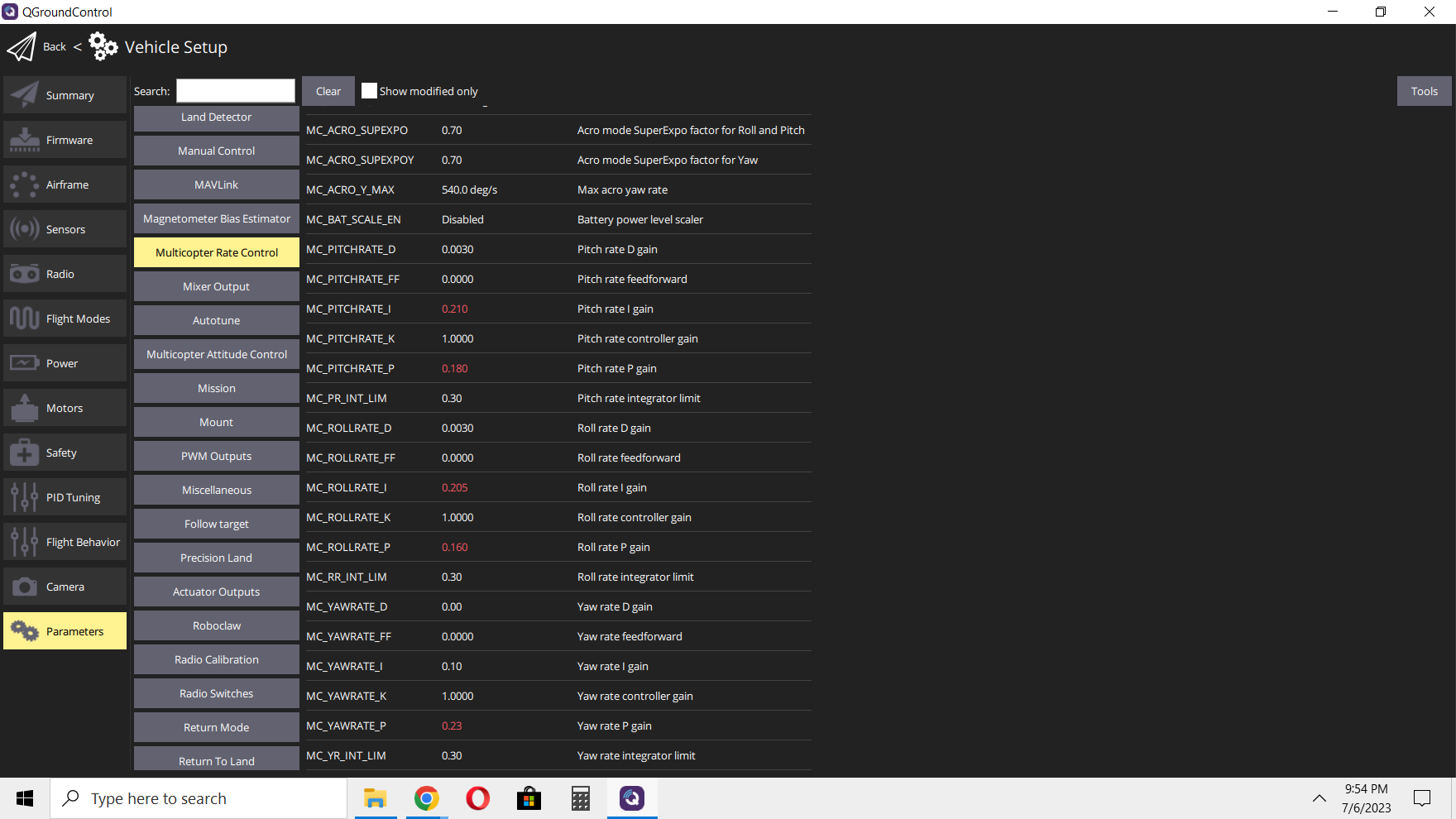
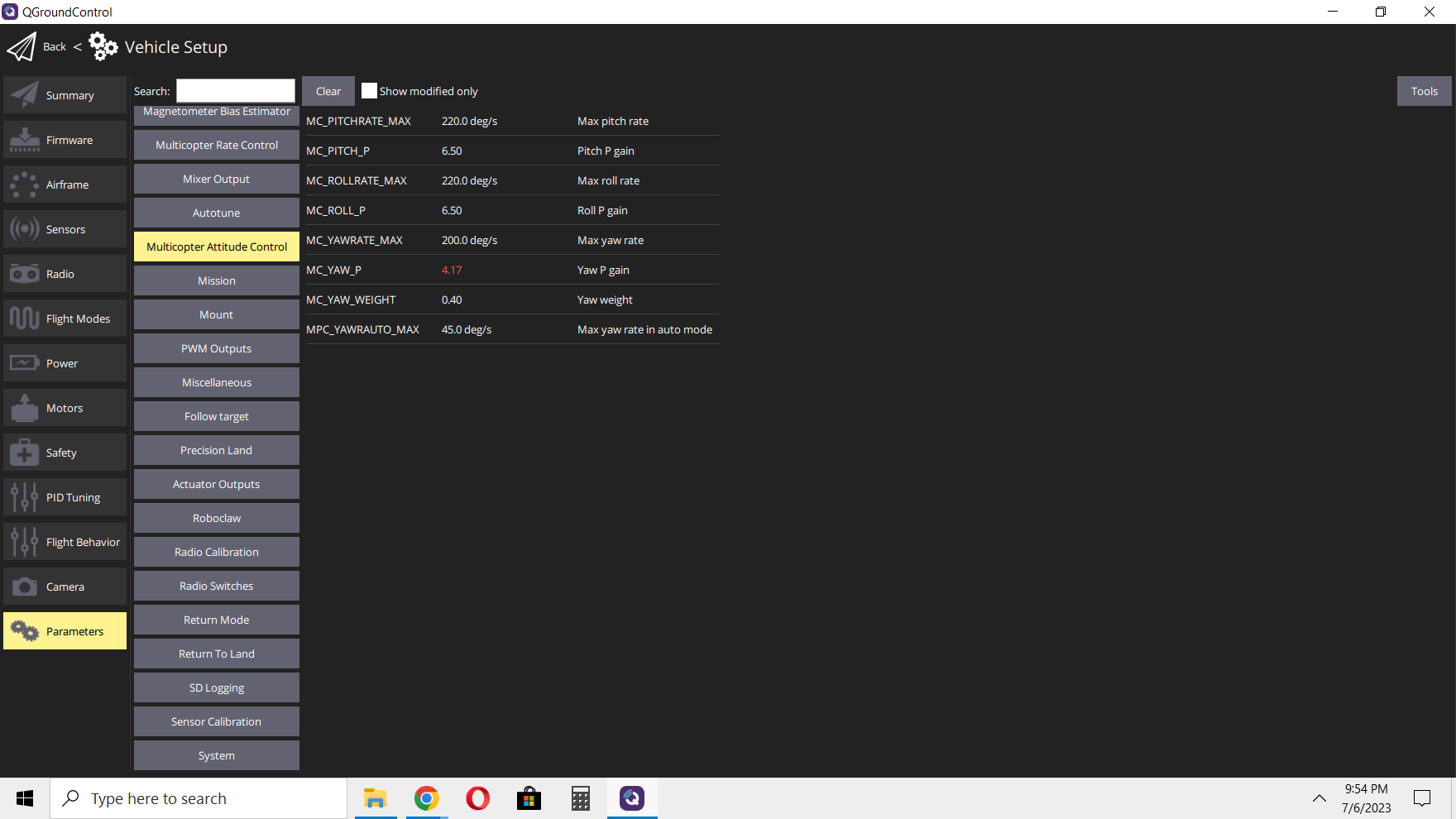
Edited - Also should I decrease the ‘K’ gain of pitch and Roll ?
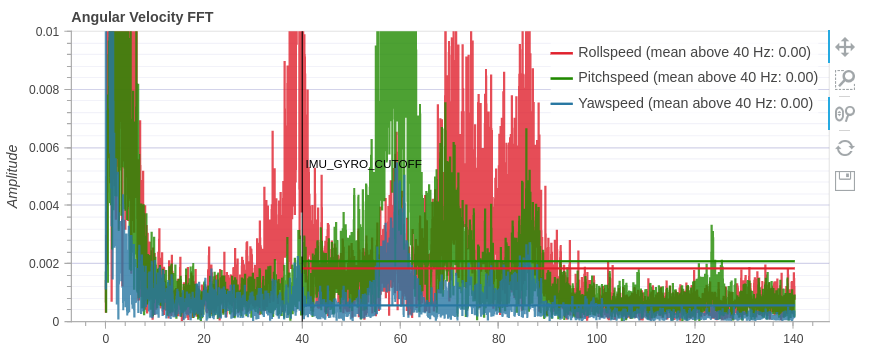
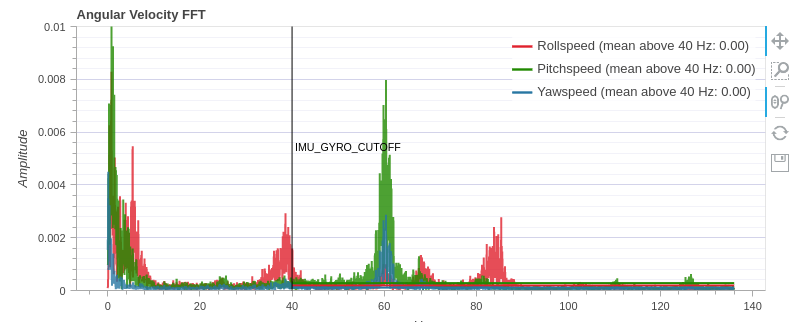
Edit 2 - After changing the gyro cut off Hz , i get this message
Accel 1 message clipping…not safe to fly
I just did a sanity check test flight with OrangePlus on a X500v2 airframe and it flew beautifully with default tuning, that’s using the release/1.14 branch.
Again, the plots look noisy because it’s pre-filtering but there is no clipping and attitude as well as position tracking was spot on.