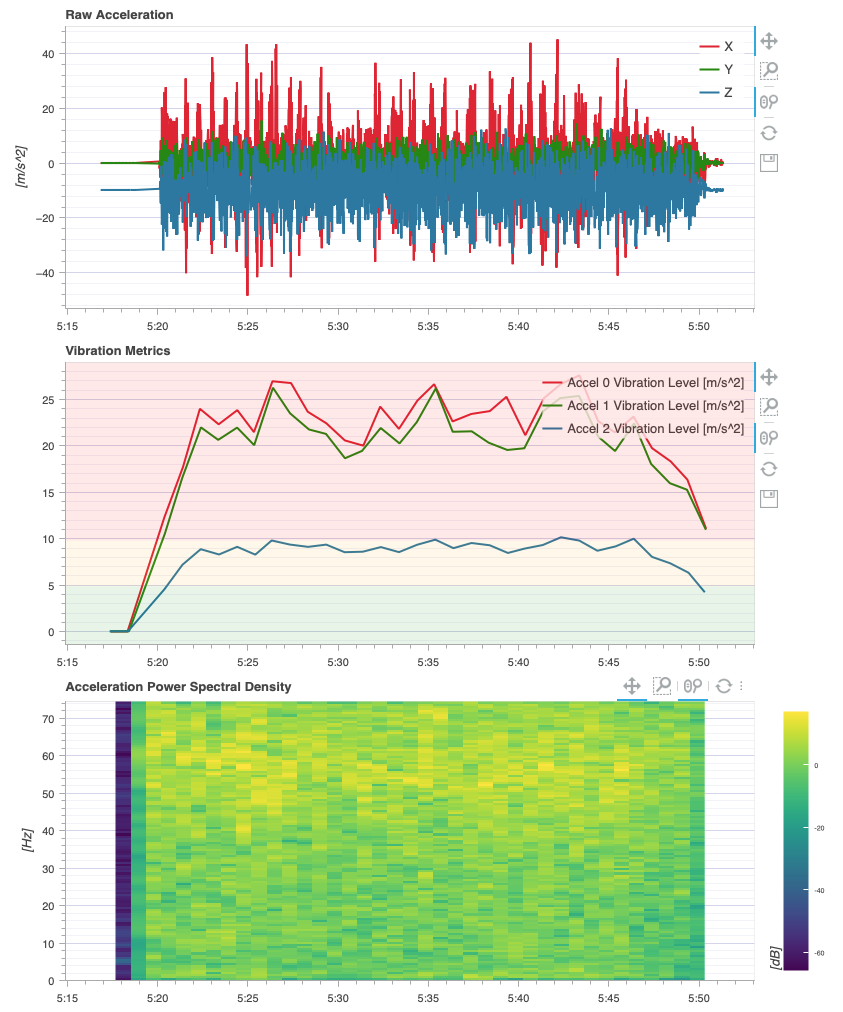
I just got an X4 from UAV Systems International. It came with arudcopter loaded on a Cube Orange+, but i switched over to PX4 and did a few test flights. The Cube Orange+ is hard mounted, but I though that was okay for the cube since 2 of the imus are mechanically isolated. My drone was a bit twitchy during the flights so I checked the accel logs and sure enough I’m seeing big vibration. Plots are attatched. What is weird is that the first 2 imus are high, but I thought they’d be lower. Any idea what is going on here? I’m at a loss. I could do some vibe isolation but that shouldn’t be needed here. I’m more concerned and the two imus showing high accel that the third.
We have the same problem with Cube Orange (no Plus).
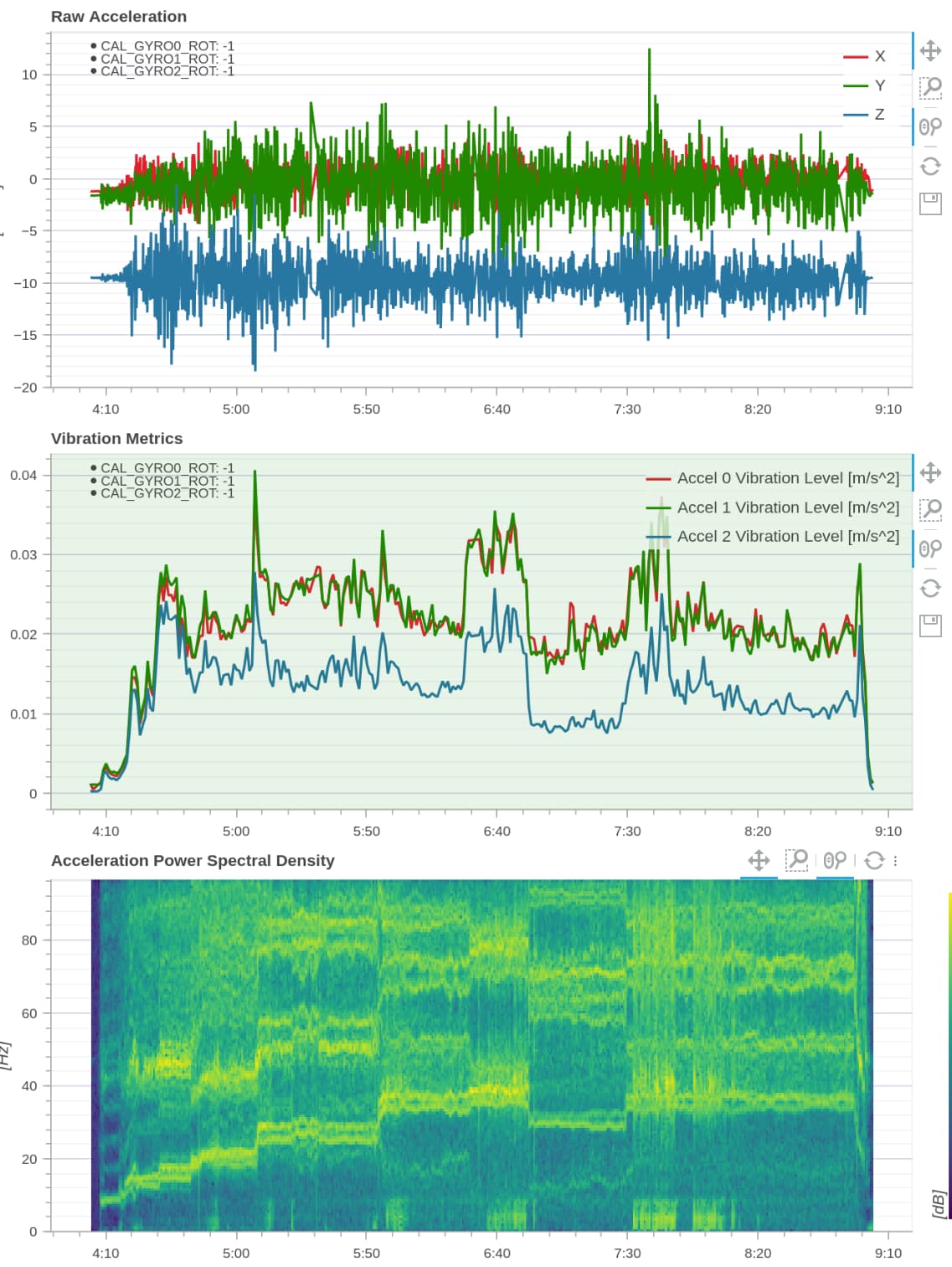
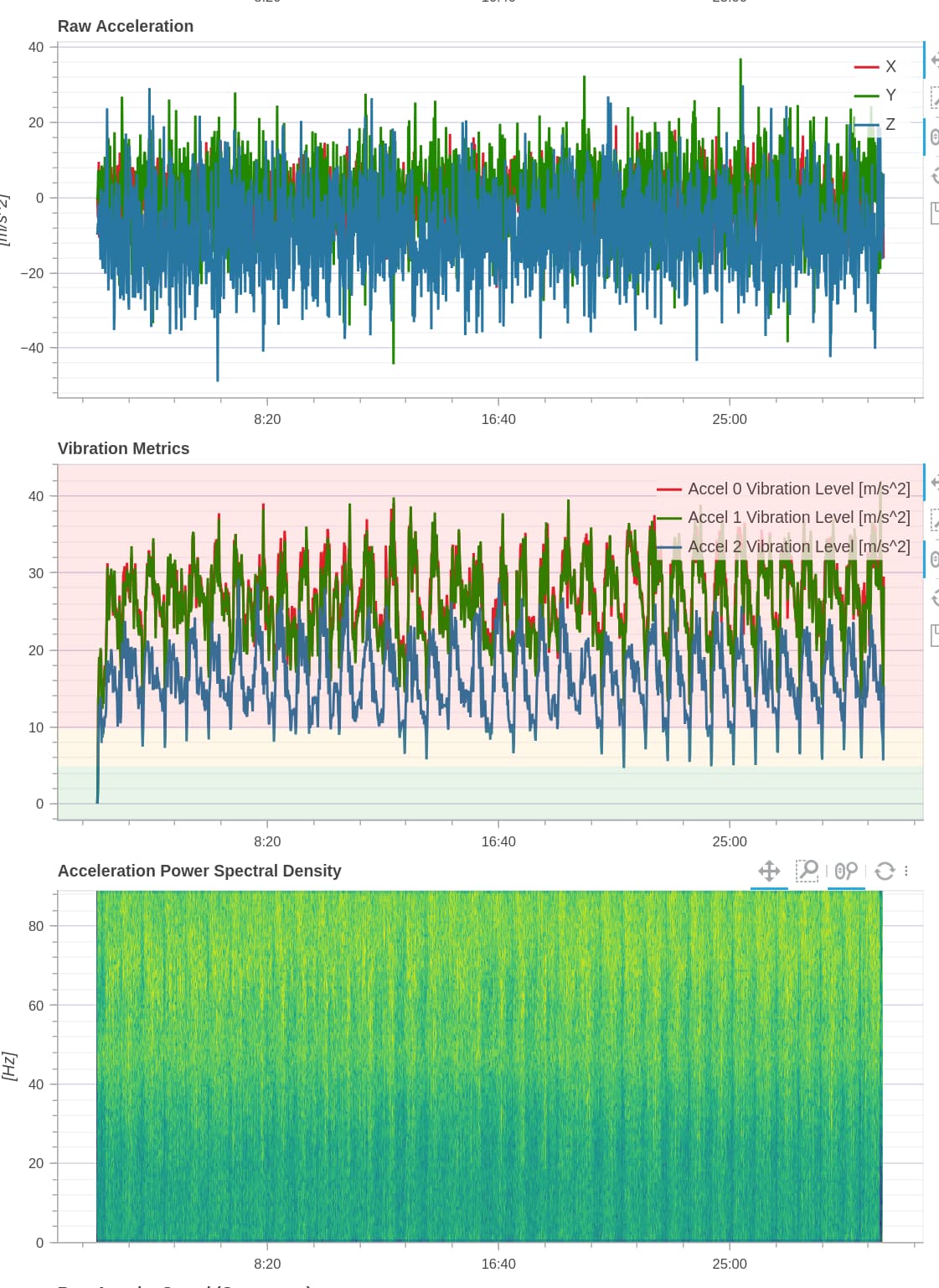
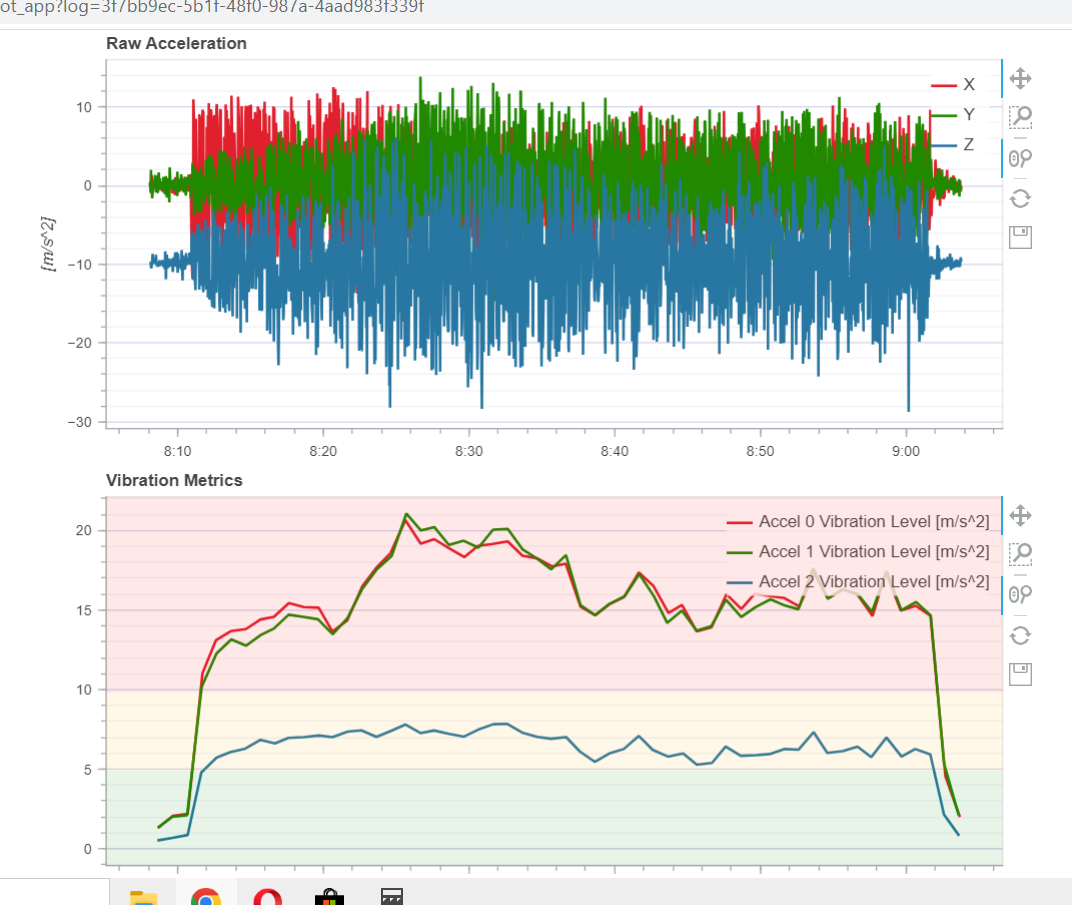
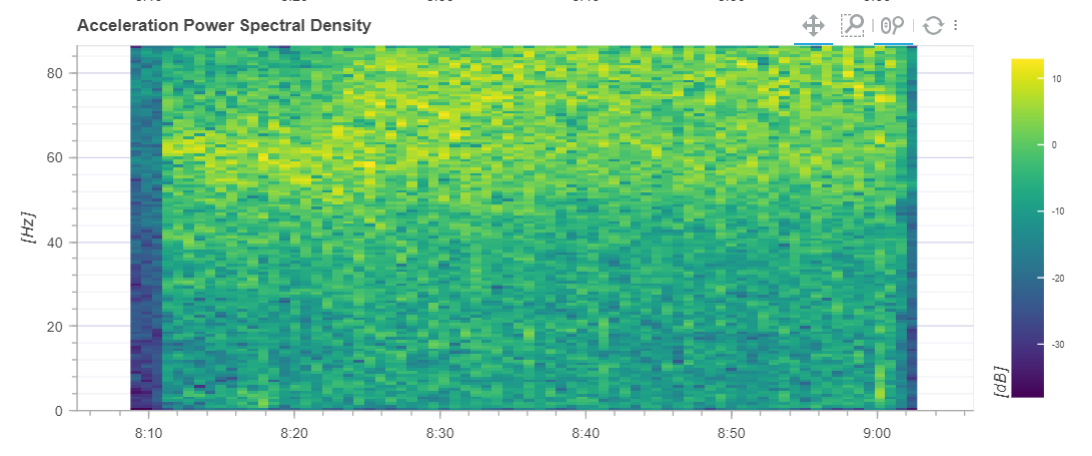
Since Px4 Revision >=1.13.0, the log file shows very strong vibrations with Raw Acelleration, Vibration Metrix which only shows in the red area and Power Spectral Density is almost only yellow. <1.13.0 so in the 1.12.x revisions our vibrations on the same hardware (FC and X8 - copter) were much lower, or really good.
We are currently working on the problem as a team, and one of the questions we have formulated as a task is to find out whether the high vibrations were caused by the upgrade from 1.12.x to 1.13, and whether, for example, default IMU filter settings or something similar no longer work after the upgrade.
Edit: Add Pictures
Same FC, same Copter, two different FC versions.
@wolke This is great to hear (for me not you). I’m glad it isn’t just me having this issue. FYI: Today I did a test where I did back to back fligths with PX4 and then Arducopter. The vibe levels all looked good for Arducopter but were dangerously high for PX4. I posted about that here:
Given your test and mine, this seems to definitely be a firmware bug of some sort. I am glad to see that you’ve tested V1.12 and V1.13 to show where the issue arose. I am running 1.14 beta. Looping in @JulianOes on this, as I mentioned this issue in another post, but wanted him to see your testing results as well.
Not sure what to do here except wait for the dev team to try to resolve this.
@wolke I’ve opened a github issue about this that you might want to keep your eye on. You might want to add your log files to that bug report so they have more information to help them diagnose the problem and patch it.
I am also joining the ME TOO movement here since moving from v1.12.3 to v1.13.3. I suspect there is something wrong with the v.13.x firmware itself as i never had so much vibrations jus becos i installed a new firmware !! Good to learn that i am not alone in this matter.
My setup is CUBE ORANGE / Herelink Radio Telemetry /PX4 v1.13.3
@bresch I’ve seen you mentioned in other controls/state estimation topics. Can you please review this topic when you get a chance? I’m grounded until this vibe issue is resolved. I’m guessing others are as well. Thanks so much.
We are working to find out how big the difference in RAW acceleration between the two firmware versions will be on a completely identical system. We are currently building a test setup for this, which at best can already fly the expected data set tomorrow. In reality, the old log data contained some, albeit small, changes to the copter hardware. A year has now passed since the old comparison data set from the 1.12.3 firmware version was flown.
We hope that this will ensure sufficient selectivity when looking at the data. In order to specifically rule out any influence of changed parameters on the hardware. I can then share the log files generated in this way here
If you notice the difference in magnitude of the acceleration graph, the calculation for vibration changed between 1.12 and 1.13. That at least explains the jump in magnitude.
@AlexKlimaj if the magnitude of the accel changed, then why do we still see a DC accel in z of -9.8 m/s^2? @wolke, @sibujacob, and I all have Z accel values that overlap this the x and y values, an expressed danger zone in the PX4 Flight review documentation. Log Analysis using Flight Review | PX4 User Guide
It is still odd to me that IMG 0 and 1 are showing higher levels than IMU 2, which is hard mounted.
Do we know for sure that the green, yellow, red levels in the vibration metrics in the flight review interface were updated with this new magnitude calculation methods?
@sibujacob Looking at your PX4 1.12 accel data, we still see two IMUs with higher levels than the third. According to the Cube documentation there are the mechanical isolation status of the IMUs
Among other things, we are also concerned with the question of why higher values are determined for Raw Acceleration??? Filtered data - Ok - I understand if changes happened afterwards. but that it has an influence on the IMU Raw Acceleration is very difficult to understand.
Our main problem at the moment is also that we had a significant misjudgment/estimation of the ekf2 height which led to a crash. the divergence between estimated altitude from ekf2 and measured altitude from GPS and Baro in this case was 40m. In order to understand why the EKF2 filter had such a strong misjudgment, one of the questions we need to clarify is whether we have a real vibration problem, or whether px4 from 1.13.0 on Cube Orange samples the IMU incorrectly.
@wolke Can you please send me the link to your Flight Review for the 1.12 flight, the screen shot of which you posted above. I am interested to see the red, yellow, green levels in the Flight Review plot for acceleration metrics.
Unfortunately, I can’t easily share the old log files via public links. since the flights were carried out in projects with non-disclosure agreements, and therefore data cannot be shared. The data I want to fly tomorrow is free of it and I can easily share it.
@wolke Okay. Can you just zoom out on that flight’s vibration metrics plot and to see if the green is between 0-5, yellow 5-10, and red >10? If they changed the vibration metric magnitude calc on 1.13 but didn’t update the Flight Review interface, it might be making us think the vibration values are scarier than they really are.
Also, can you please post in this bug report about your experience? High acceleration levels when running on Cube Orange (+) · Issue #21802 · PX4/PX4-Autopilot · GitHub
in 1.13.0:
green is <= 5
yellow from 5 to 10
and red above 10
at the top of this topic I have attached the pictures with the vibration metrics. It’s easy to see there. in 1.12.3 we are also scaled completely differently. there is the scale 0.01 and 0.04 yellow is far from being displayed. the color limits in 1.12.3 are the same as in version 1.13, i.e. yellow from 5 and red from 10.
Edit:
without wanting to repeat myself :), regardless of the calculated metrics display, I just don’t understand the different values in the raw acceleration plot.
I just wanted to see if the Flight Review software changed the y scaling based on the version - ie. does yellow still start at 5? I am guess that Flight Review didn’t update when the scaling changed in 1.13.
This doesn’t change the fact that the Raw Accel values are way too high.