Hi,
We bought H-RTK Unicore UM982 (Dual Antenna) from Holybro a few months ago to use in our UAV.
Purpose of using UM982:
The purpose of buying this item was to fix the YAW problem (UAV not turning in Mission flight) which was due to the higher amount of EMF around the GPS module (M8N) and the Pixhawk 4.
UAV Setup details:
GPS Module: H-RTK Unicore UM982 (Dual Antenna)
AutoPilot: Pixhawk 6C (GPS port 1)
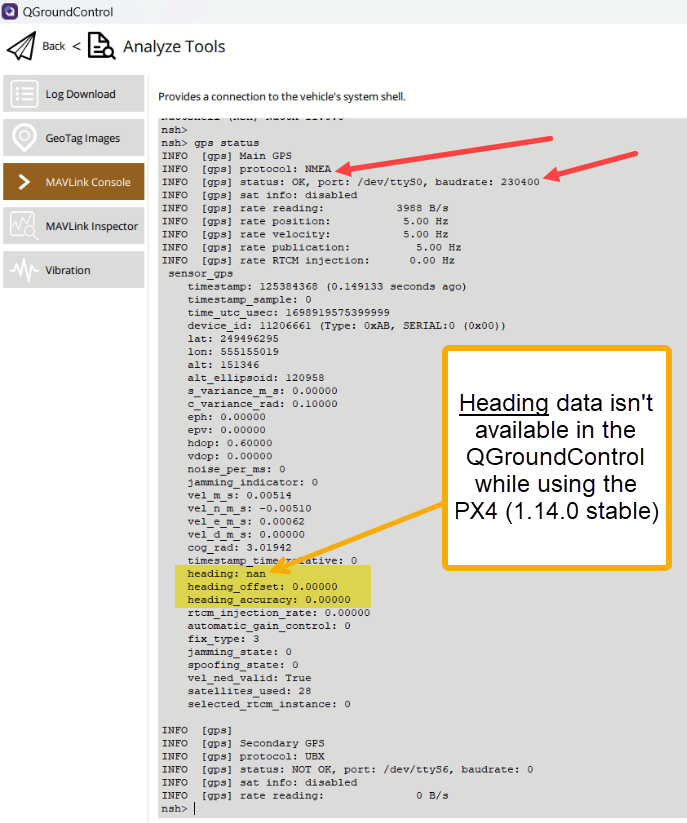
Firmware: PX4 (1.14.0 stable)
Antennas Configuration: Primary Antenna (Nose), Secondary Antenna (Tail) (distance among both is almost 50cm)
We followed all the installation instructions on the PX4 and Holybro UM982 websites.
Issue:
-
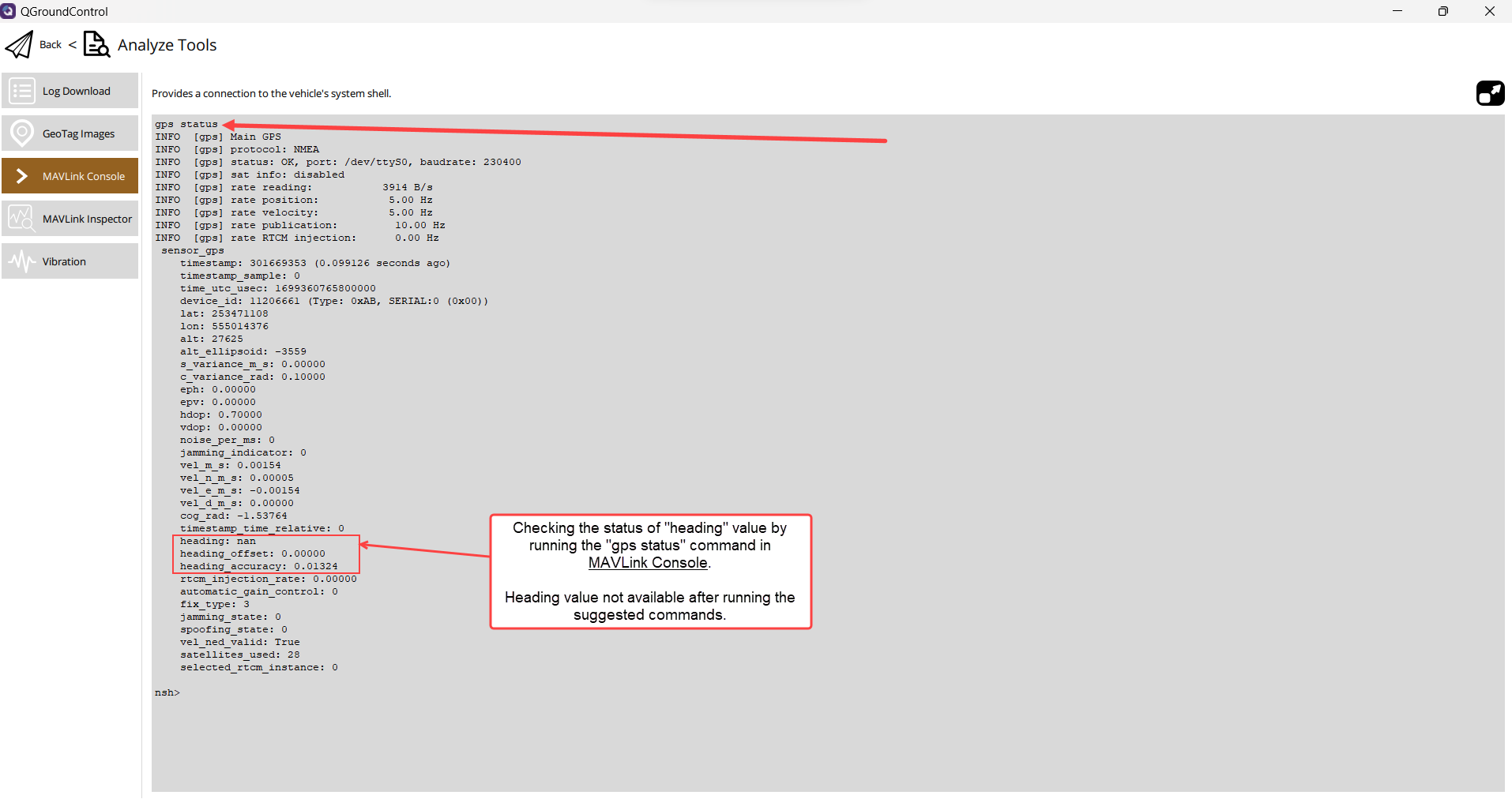
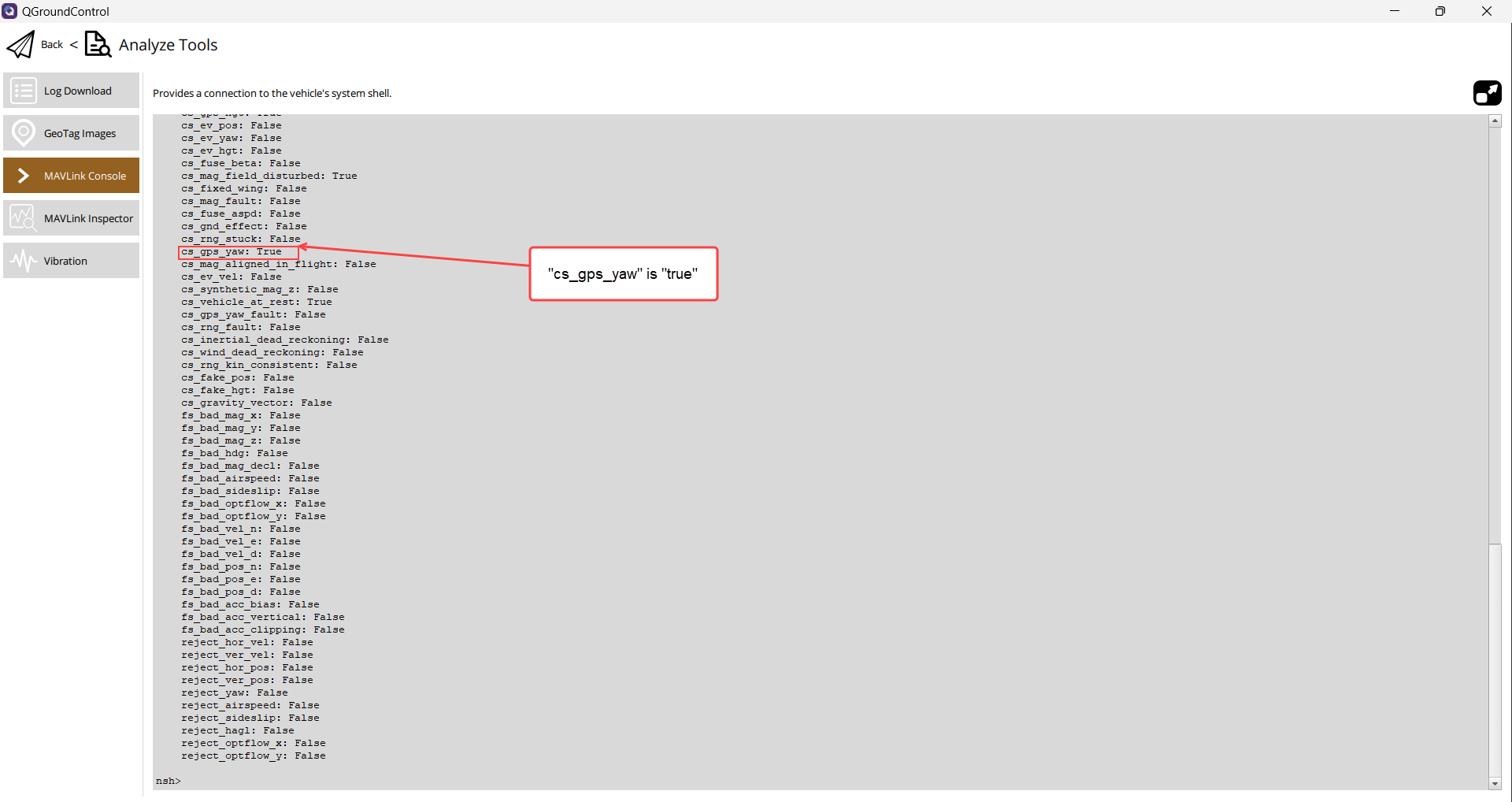
We aren’t getting the data of the heading. Moreover, we are losing the GPS position data as well.
-
Our UAV shows it’s in position flight mode, but the logs show the position data is missing during the flight (Position mode).
-
We tried to do a mission flight, but it immediately went to Altitude mode because of no global position. Here (flightreview) is the log of that flight.
Verification of Heading Data on Uprecise application:
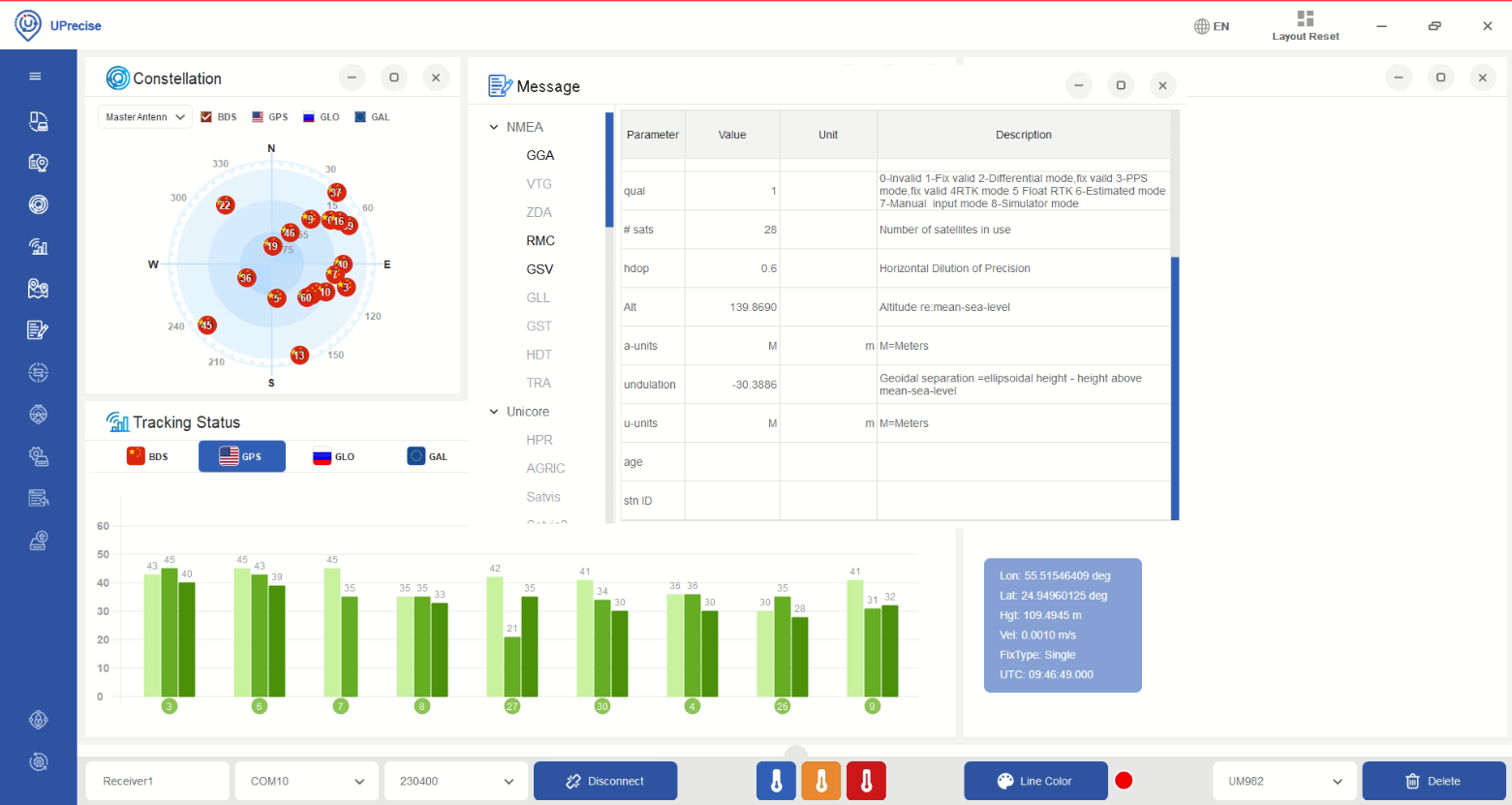
To verify the heading data from the UM982, we connect the UM982 directly with laptop using the USB C type cable and installed the Uprecise application.
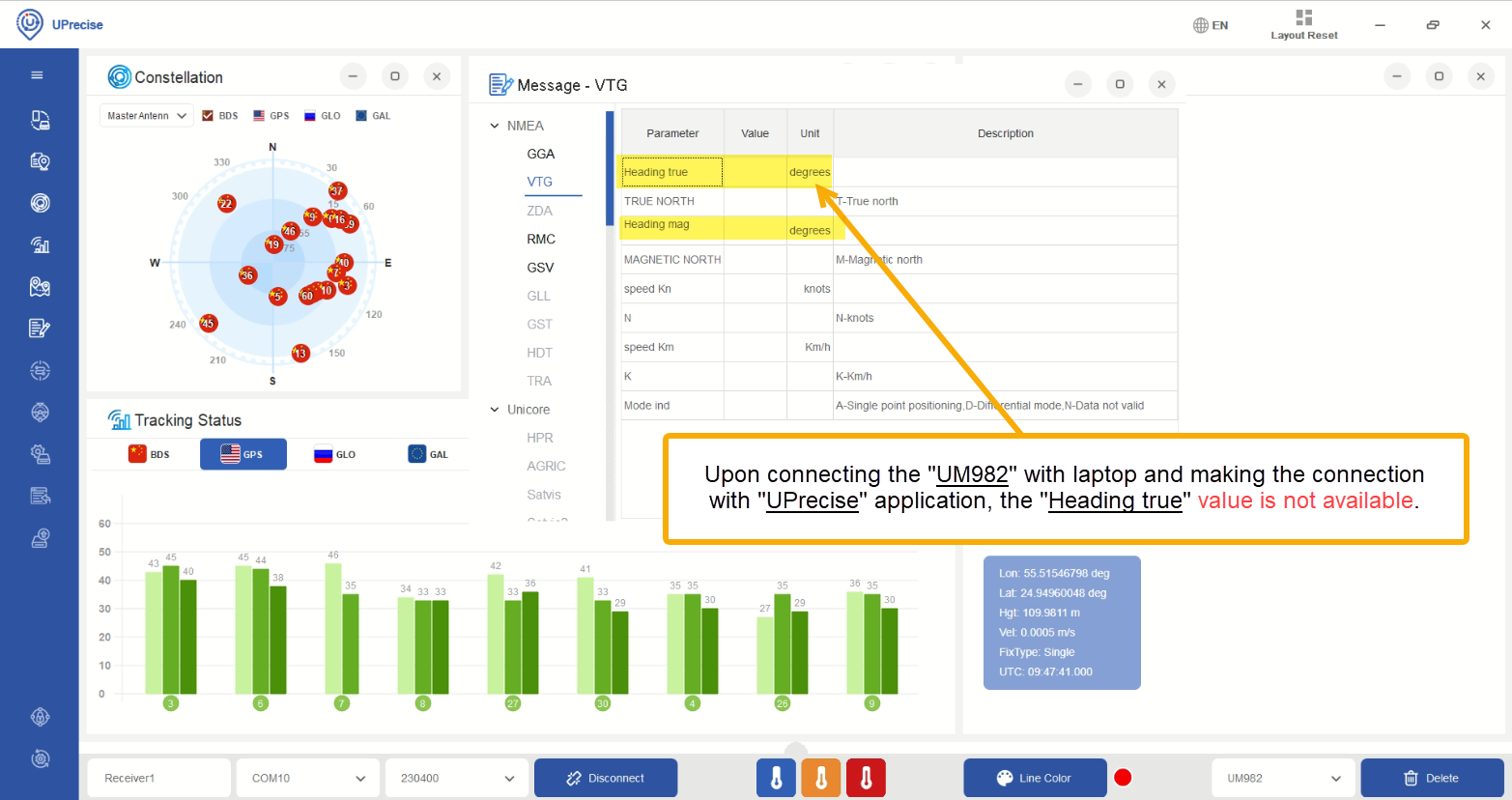
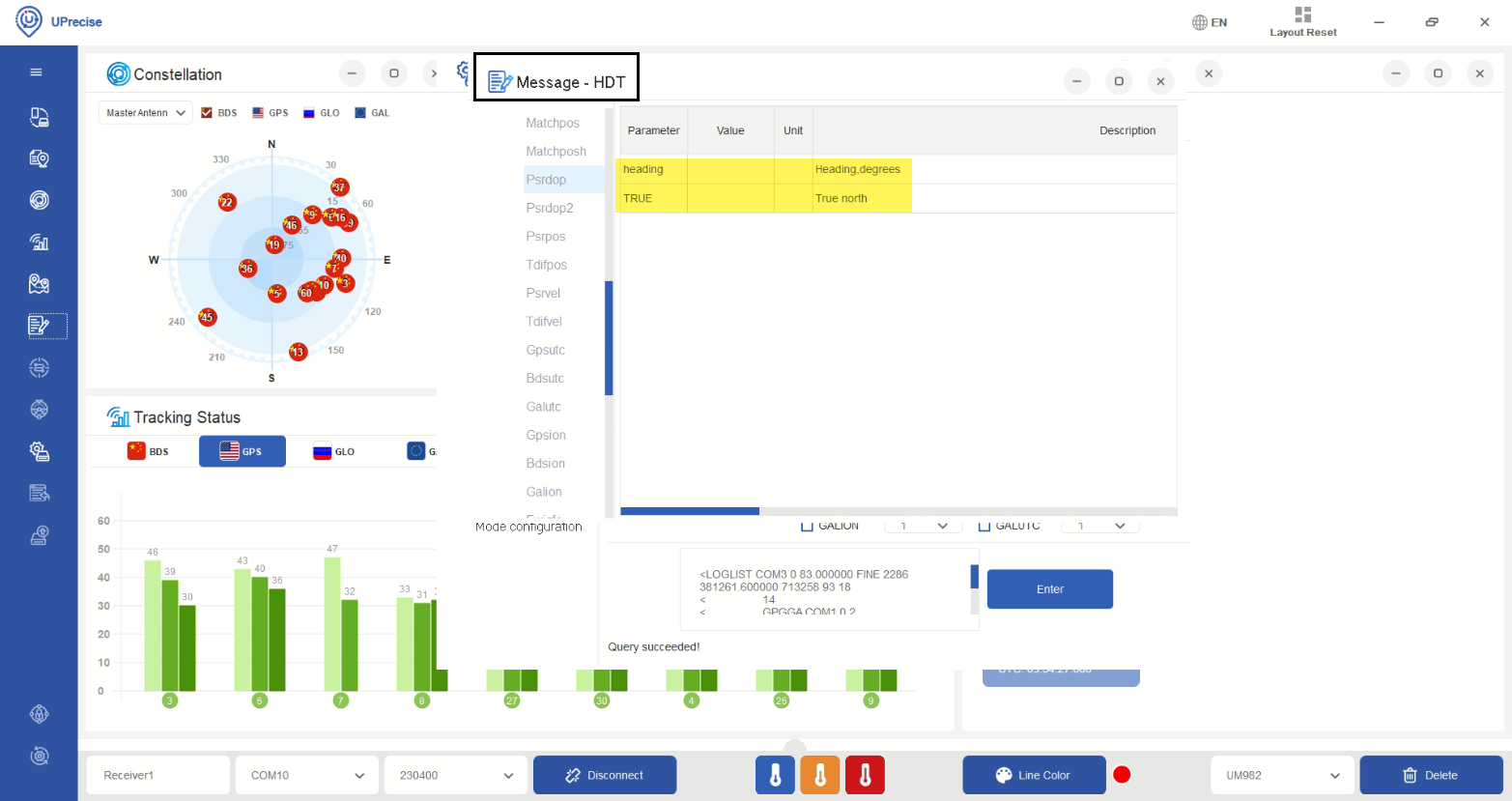
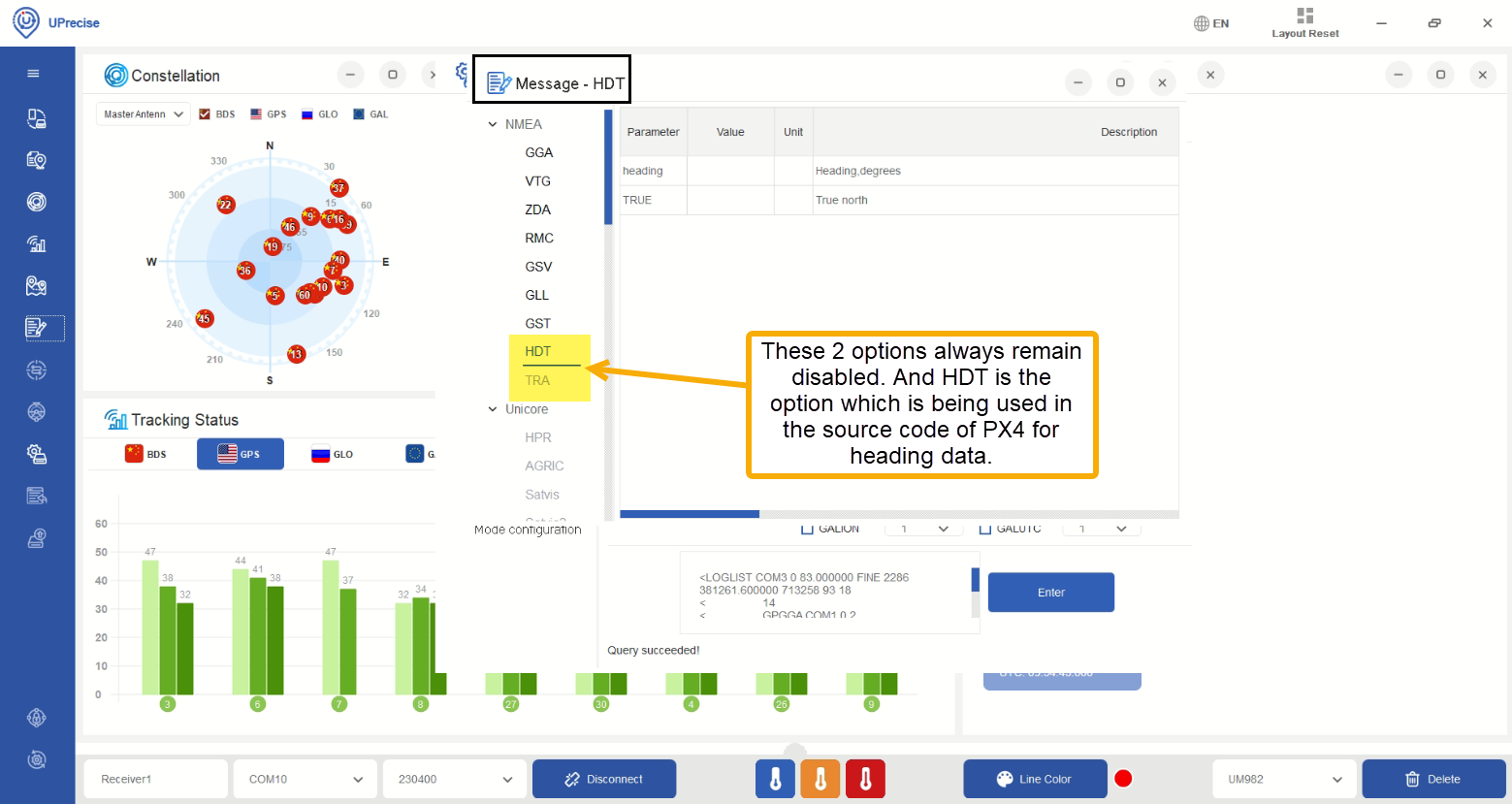
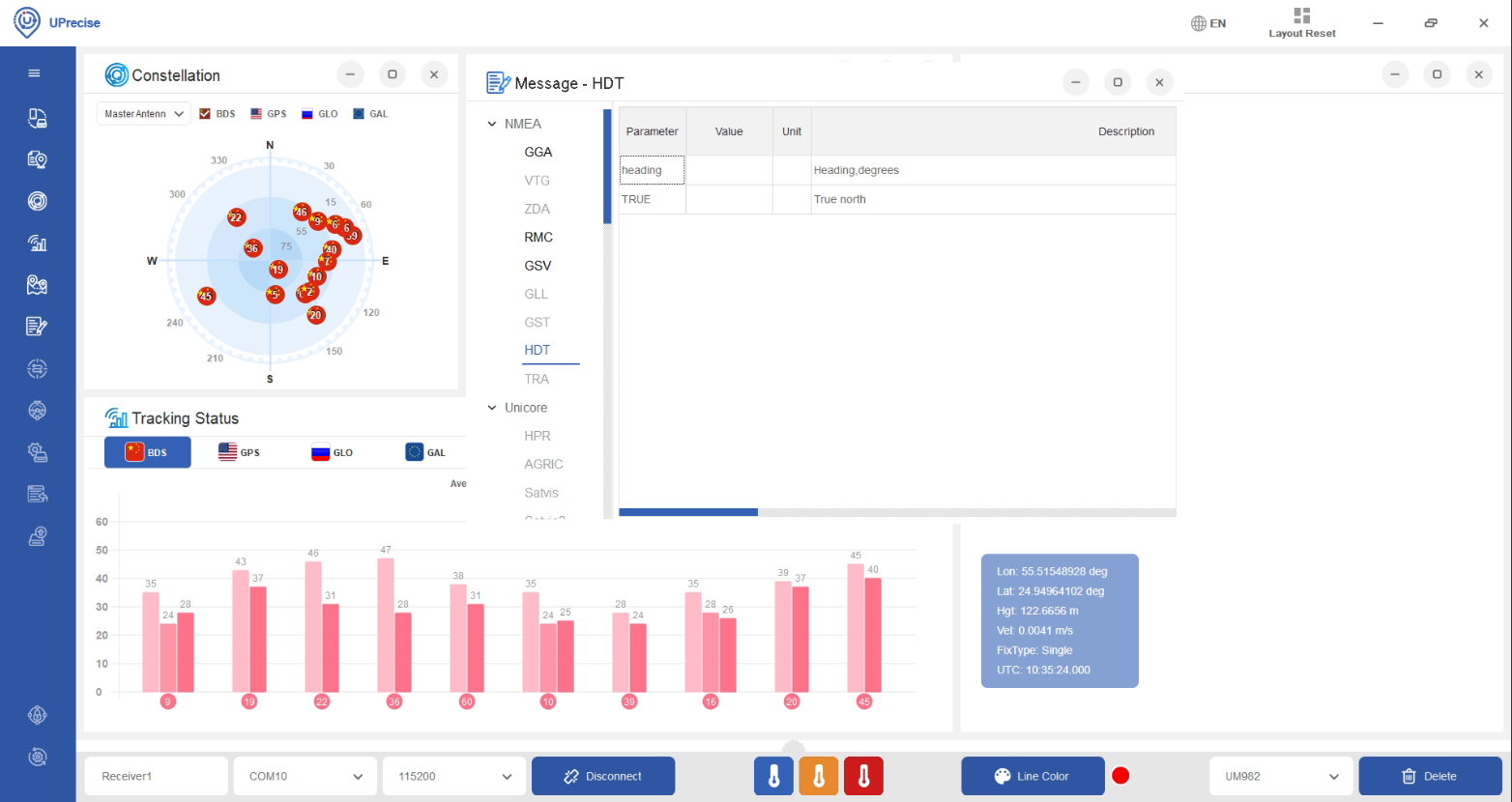
Upon checking the heading information from the “Messages” tab under the “NMEA” section, we found out that the “HDT” & “TRA” are disabled and no heading data is available in the “VTG” tab also.
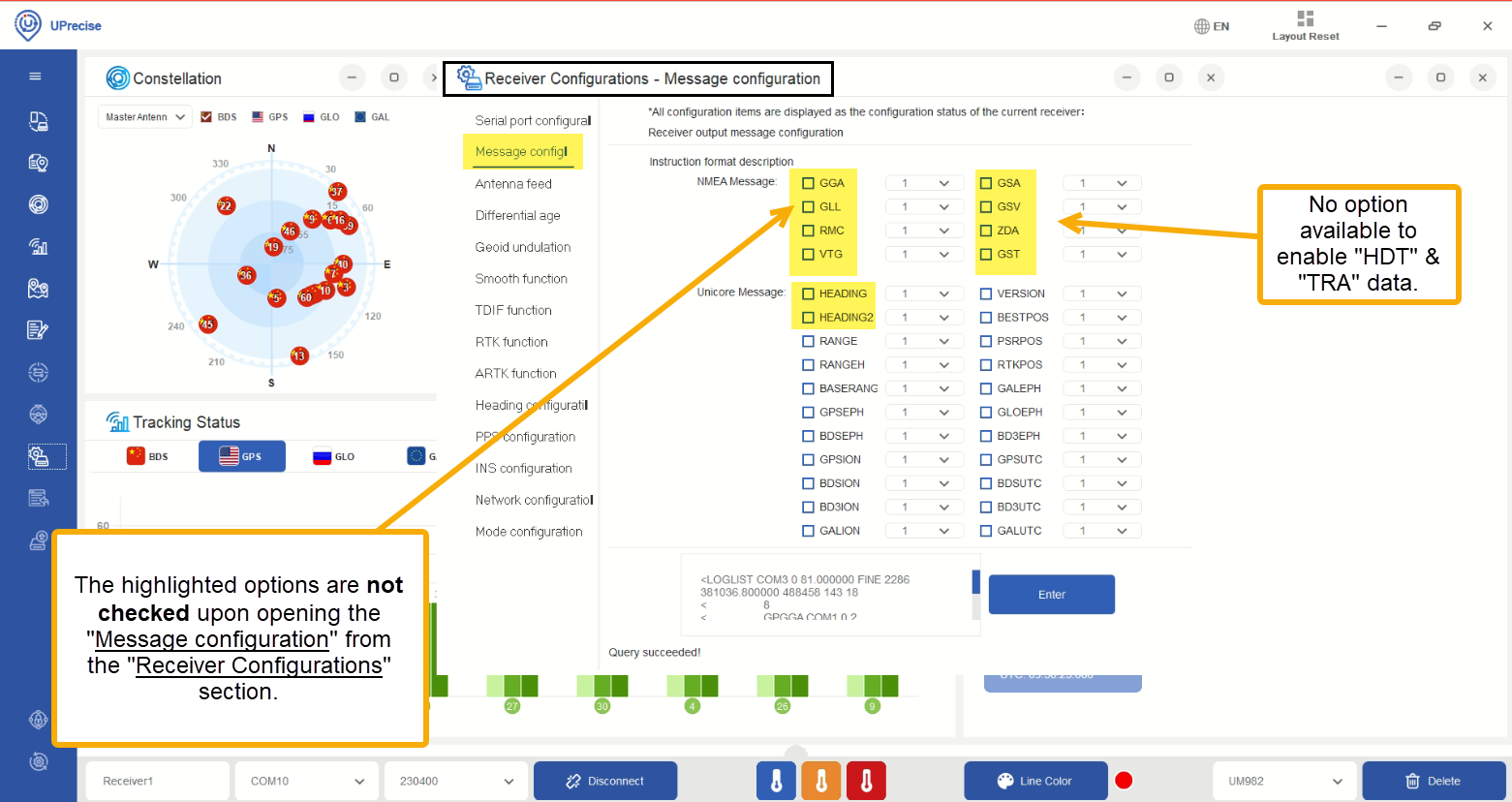
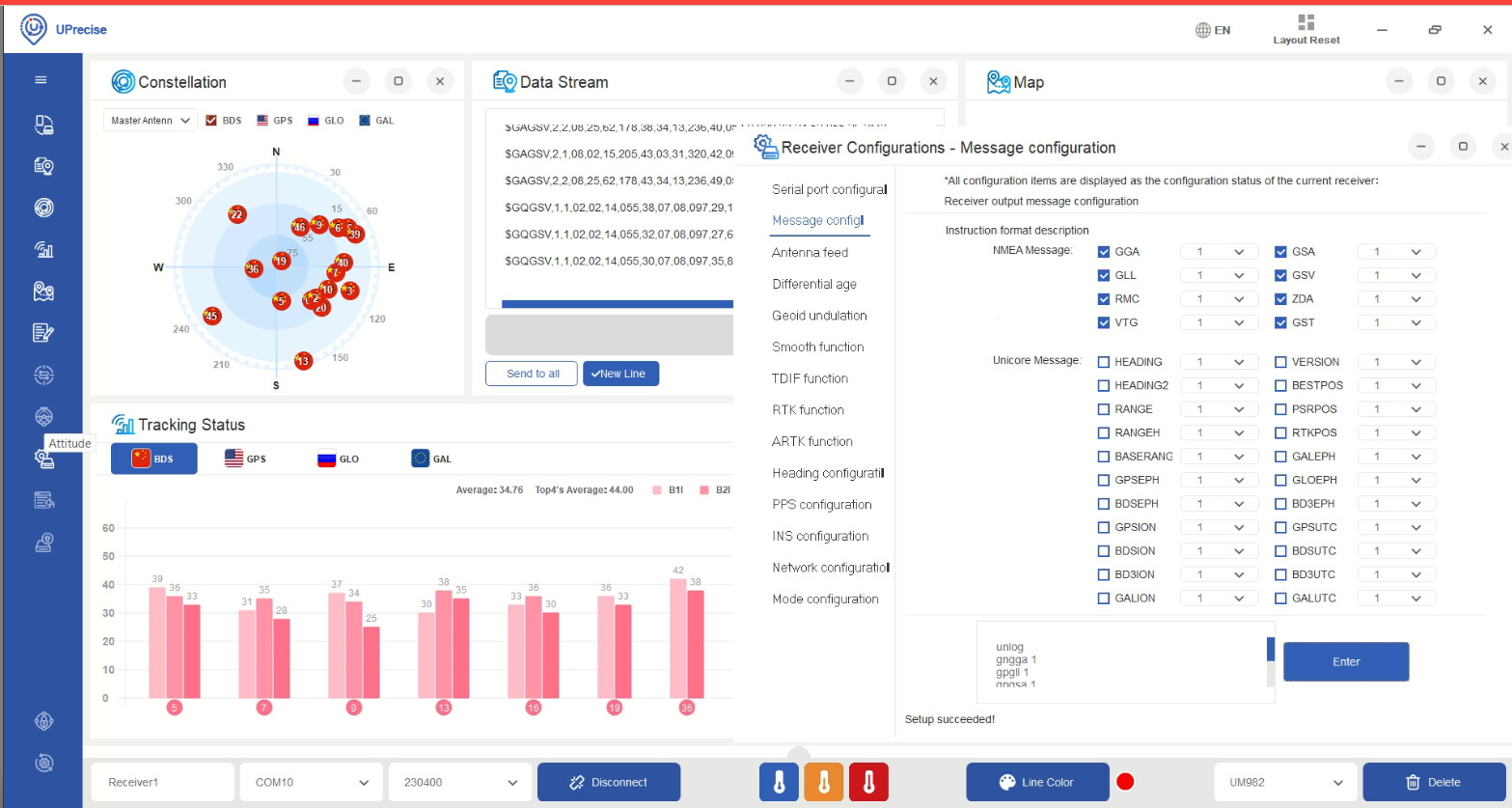
We checked the configurations under the “Receiver Configurations - Message configuration” and found out that all “NMEA Message” protocols are unchecked.
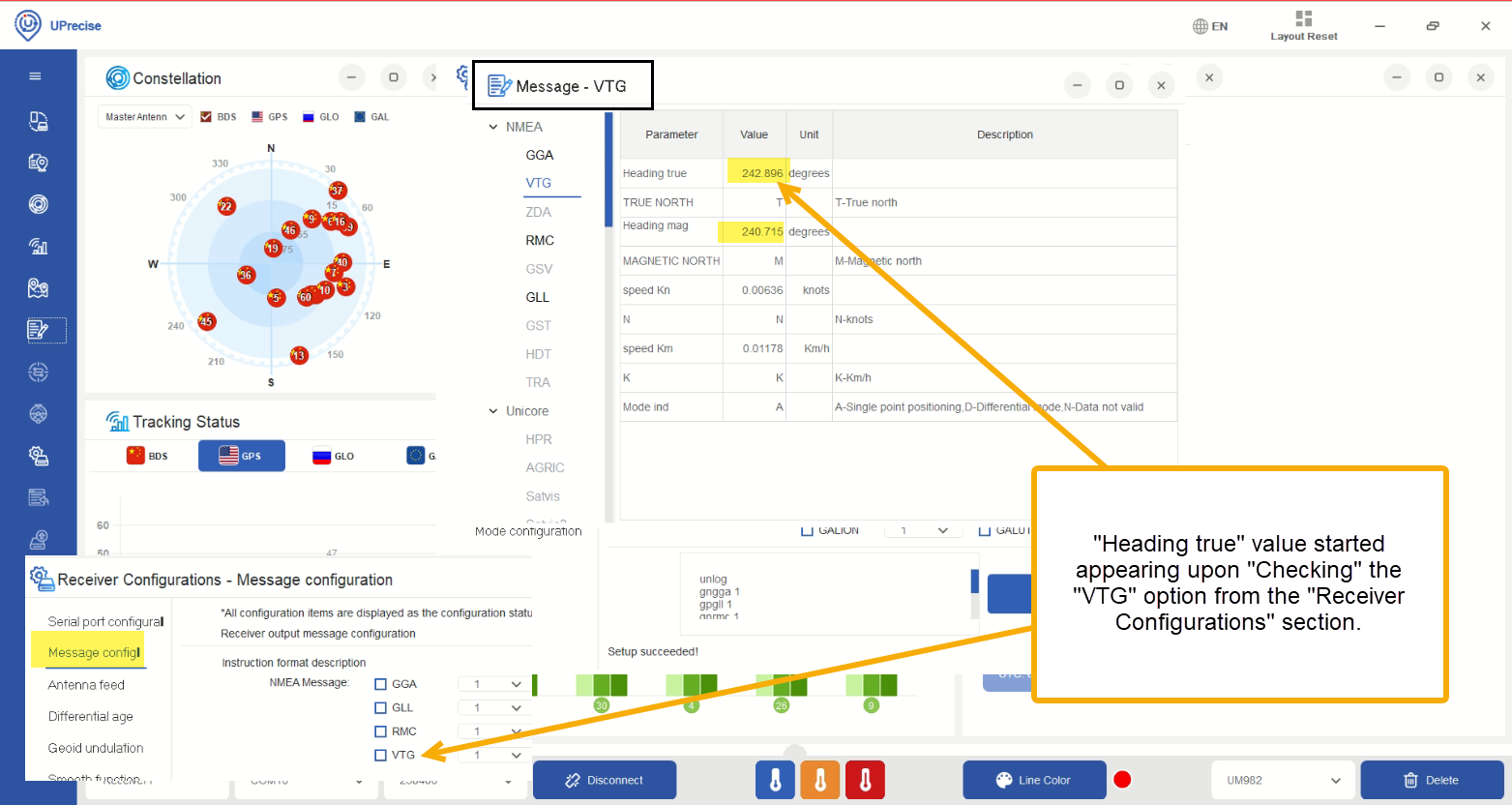
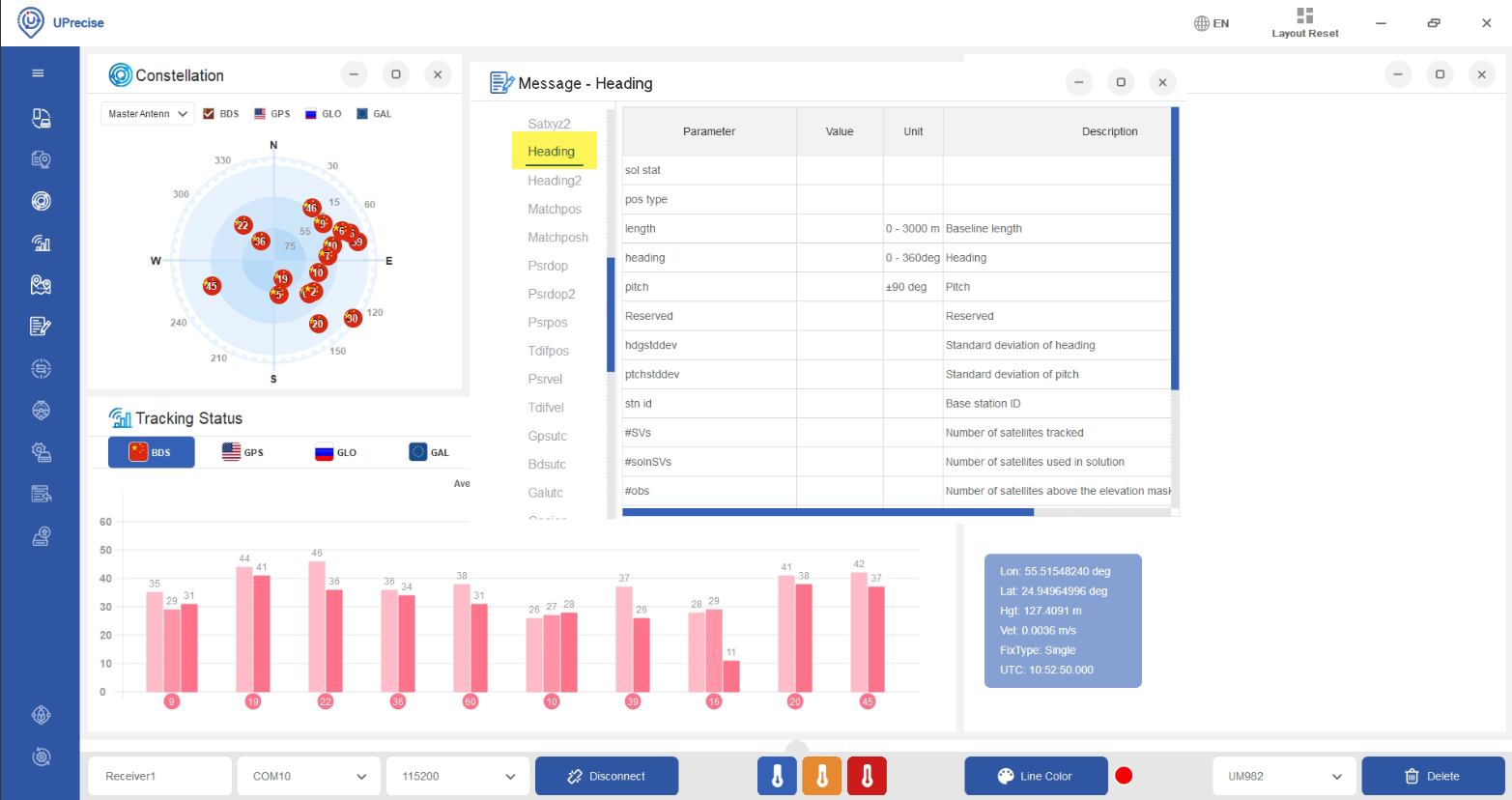
Upon enabling all options under the “NMEA Message” and HEADING/HEADING2 options under “Unicore Message”, we found out that now heading information is appearing in the “Message - VTG”. After seeing the data of heading in “Message - VTG”, we connected the UM982 with Pixhawk as told above, but still the heading data isn’t available in the mavlink inspector section.
We then again connected the UM982 with laptop via USB C cable, and found out that the “Message - VTG” is again not showing the data.
Upon disconnecting and connecting the UM982 again to laptop after saving the “NMEA Message”, the heading data goes away. (Maybe an EPROM issue)
Tried solutions?
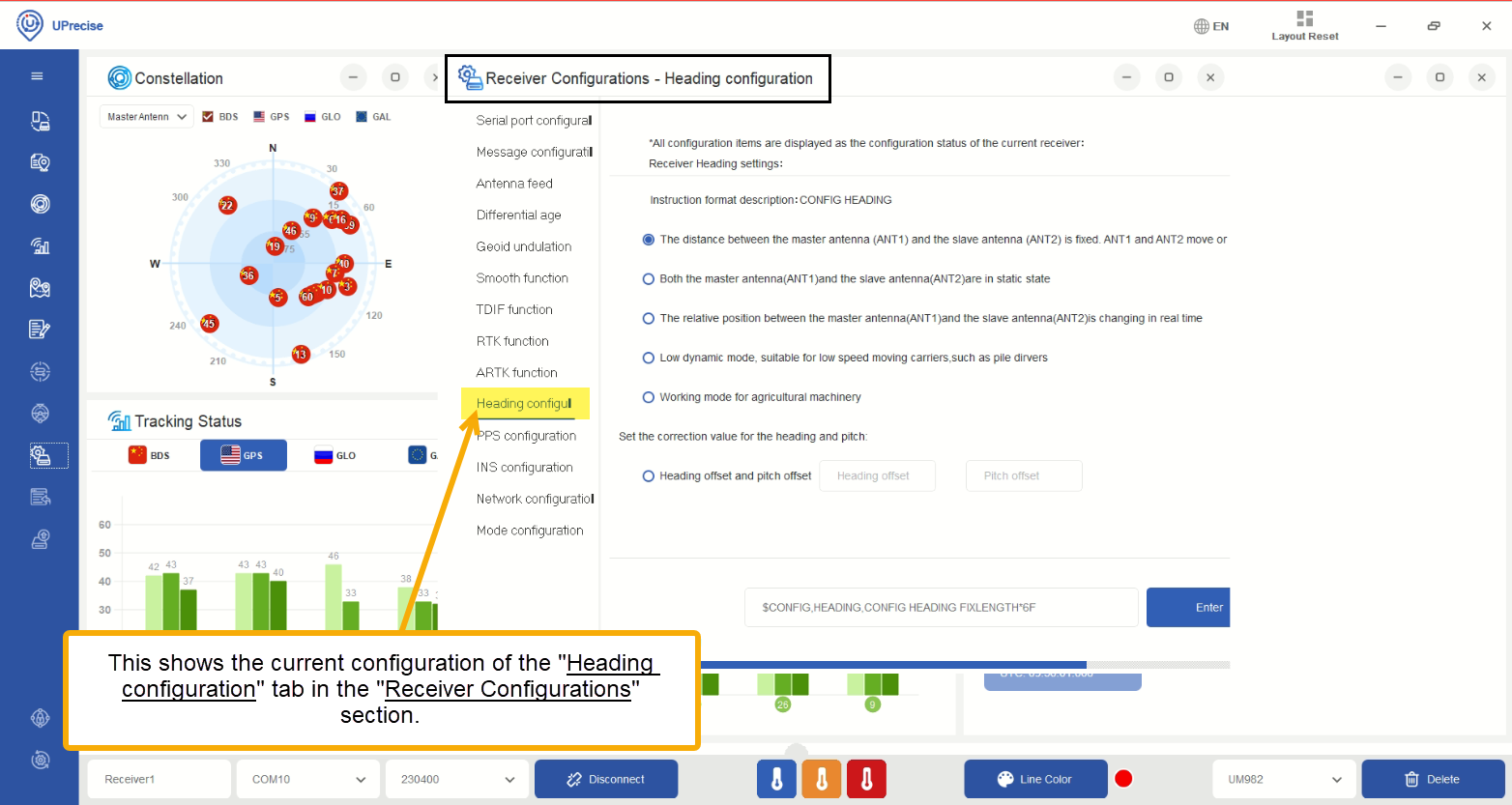
1- We reset the UM982 module using the Uprecise application and the instructions from the Holybro documentation. But the result is same.
2- Tried the command UNIHEADINGA COM1 0.2 in Uprecise. But still the result is same.
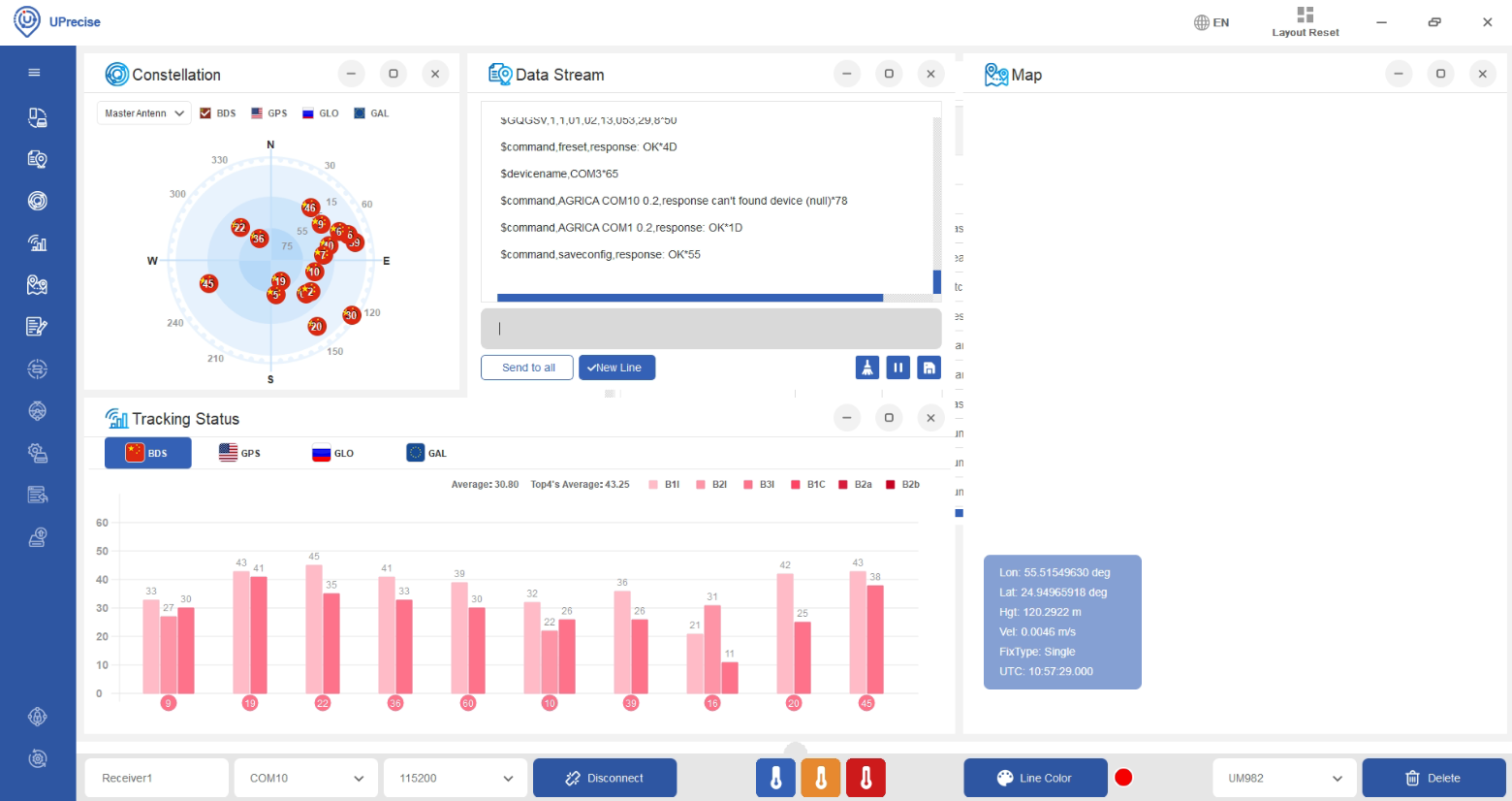
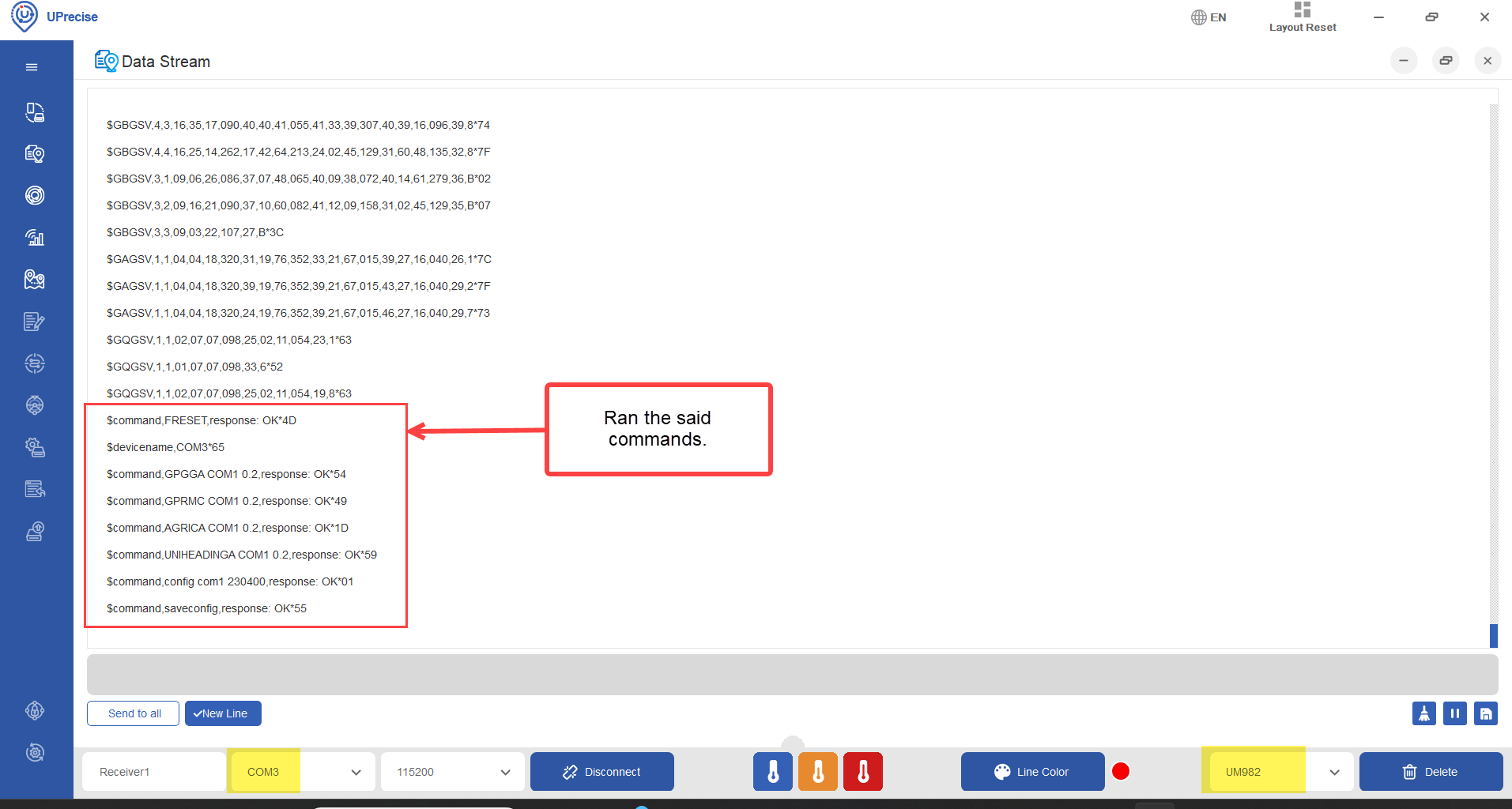
3- Tried the following commands, but the solution is still not working.
FRESET
GPGGA COM1 0.2
GPRMC COM1 0.2
AGRICA COM1 0.2
UNIHEADINGA COM1 0.2
config com1 230400
saveconfig
All the detailed snapshots are attached with this post.
Please do let us know if you need more information.