Hi, We purchased 2 Holybro DroneCAN H-RTK F9P Helical GPS for GPS Heading, we took as reference the compatible list of RTK GPS Heading with Dual u-blox F9P.
Also in the Holybro documentation said that the GPS was compatible with heading, they changed their documentation after contacting them.
We managed to have 3D GPS RTK Lock (fixed) with both GPS connected to the autopilot.
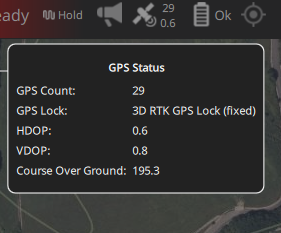
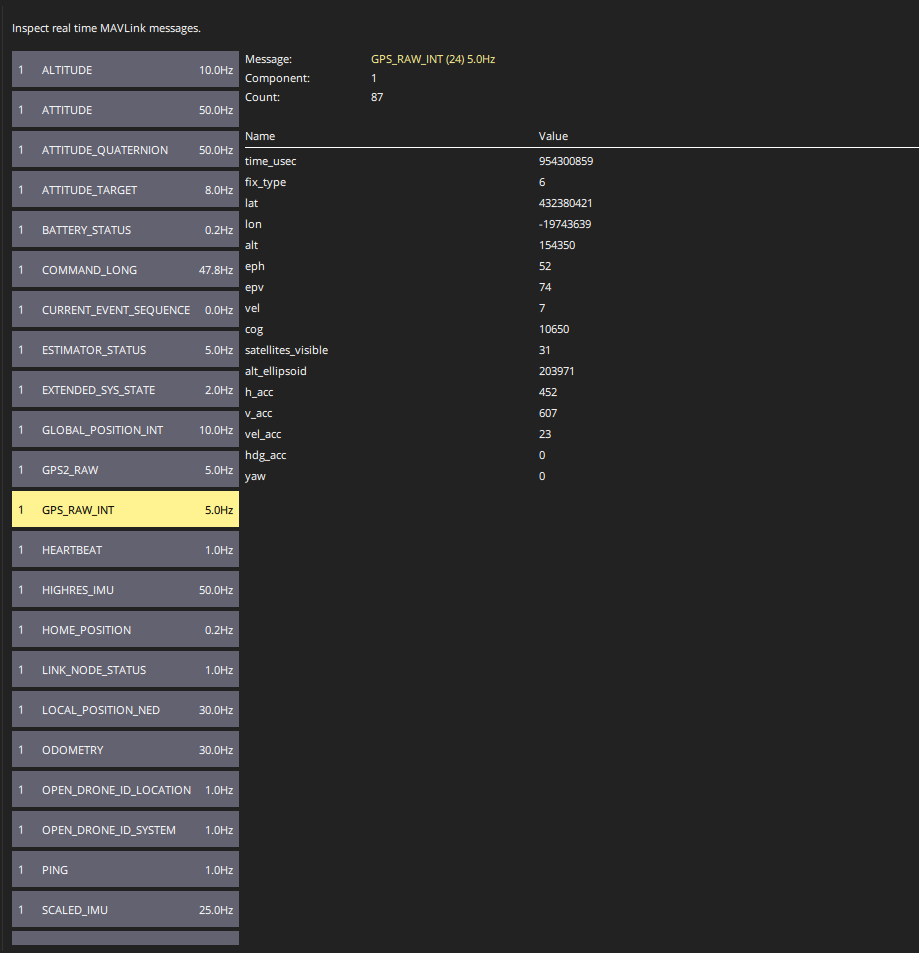
But there is no evidence that the heading is working
nsh: sysinit: fopen failed: No such file or directory
NuttShell (NSH) NuttX-11.0.0
nsh> listener estimator_status_flags
TOPIC: estimator_status_flags 3 instances
Instance 0:
estimator_status_flags
timestamp: 988480835 (0.361949 seconds ago)
timestamp_sample: 988310878 (169957 us before timestamp)
control_status_changes: 17
fault_status_changes: 0
innovation_fault_status_changes: 2
cs_tilt_align: True
cs_yaw_align: True
cs_gps: True
cs_opt_flow: False
cs_mag_hdg: True
cs_mag_3d: False
cs_mag_dec: False
cs_in_air: False
cs_wind: False
cs_baro_hgt: True
cs_rng_hgt: False
cs_gps_hgt: True
cs_ev_pos: False
cs_ev_yaw: False
cs_ev_hgt: False
cs_fuse_beta: False
cs_mag_field_disturbed: False
cs_fixed_wing: False
cs_mag_fault: False
cs_fuse_aspd: False
cs_gnd_effect: False
cs_rng_stuck: False
cs_gps_yaw: False
cs_mag_aligned_in_flight: False
cs_ev_vel: False
cs_synthetic_mag_z: False
cs_vehicle_at_rest: True
cs_gps_yaw_fault: False
cs_rng_fault: False
cs_inertial_dead_reckoning: False
cs_wind_dead_reckoning: False
cs_rng_kin_consistent: False
cs_fake_pos: False
cs_fake_hgt: False
cs_gravity_vector: False
fs_bad_mag_x: False
fs_bad_mag_y: False
fs_bad_mag_z: False
fs_bad_hdg: False
fs_bad_mag_decl: False
fs_bad_airspeed: False
fs_bad_sideslip: False
fs_bad_optflow_x: False
fs_bad_optflow_y: False
fs_bad_vel_n: False
fs_bad_vel_e: False
fs_bad_vel_d: False
fs_bad_pos_n: False
fs_bad_pos_e: False
fs_bad_pos_d: False
fs_bad_acc_bias: False
fs_bad_acc_vertical: False
fs_bad_acc_clipping: False
reject_hor_vel: False
reject_ver_vel: False
reject_hor_pos: False
reject_ver_pos: False
reject_yaw: False
reject_airspeed: False
reject_sideslip: False
reject_hagl: False
reject_optflow_x: False
reject_optflow_y: False
Instance 1:
estimator_status_flags
timestamp: 988374834 (0.549414 seconds ago)
timestamp_sample: 988194047 (180787 us before timestamp)
control_status_changes: 17
fault_status_changes: 0
innovation_fault_status_changes: 2
cs_tilt_align: True
cs_yaw_align: True
cs_gps: True
cs_opt_flow: False
cs_mag_hdg: True
cs_mag_3d: False
cs_mag_dec: False
cs_in_air: False
cs_wind: False
cs_baro_hgt: True
cs_rng_hgt: False
cs_gps_hgt: True
cs_ev_pos: False
cs_ev_yaw: False
cs_ev_hgt: False
cs_fuse_beta: False
cs_mag_field_disturbed: False
cs_fixed_wing: False
cs_mag_fault: False
cs_fuse_aspd: False
cs_gnd_effect: False
cs_rng_stuck: False
cs_gps_yaw: False
cs_mag_aligned_in_flight: False
cs_ev_vel: False
cs_synthetic_mag_z: False
cs_vehicle_at_rest: True
cs_gps_yaw_fault: False
cs_rng_fault: False
cs_inertial_dead_reckoning: False
cs_wind_dead_reckoning: False
cs_rng_kin_consistent: False
cs_fake_pos: False
cs_fake_hgt: False
cs_gravity_vector: False
fs_bad_mag_x: False
fs_bad_mag_y: False
fs_bad_mag_z: False
fs_bad_hdg: False
fs_bad_mag_decl: False
fs_bad_airspeed: False
fs_bad_sideslip: False
fs_bad_optflow_x: False
fs_bad_optflow_y: False
fs_bad_vel_n: False
fs_bad_vel_e: False
fs_bad_vel_d: False
fs_bad_pos_n: False
fs_bad_pos_e: False
fs_bad_pos_d: False
fs_bad_acc_bias: False
fs_bad_acc_vertical: False
fs_bad_acc_clipping: False
reject_hor_vel: False
reject_ver_vel: False
reject_hor_pos: False
reject_ver_pos: False
reject_yaw: False
reject_airspeed: False
reject_sideslip: False
reject_hagl: False
reject_optflow_x: False
reject_optflow_y: False
Instance 2:
estimator_status_flags
timestamp: 988149971 (0.855342 seconds ago)
timestamp_sample: 987968413 (181558 us before timestamp)
control_status_changes: 17
fault_status_changes: 0
innovation_fault_status_changes: 2
cs_tilt_align: True
cs_yaw_align: True
cs_gps: True
cs_opt_flow: False
cs_mag_hdg: True
cs_mag_3d: False
cs_mag_dec: False
cs_in_air: False
cs_wind: False
cs_baro_hgt: True
cs_rng_hgt: False
cs_gps_hgt: True
cs_ev_pos: False
cs_ev_yaw: False
cs_ev_hgt: False
cs_fuse_beta: False
cs_mag_field_disturbed: False
cs_fixed_wing: False
cs_mag_fault: False
cs_fuse_aspd: False
cs_gnd_effect: False
cs_rng_stuck: False
cs_gps_yaw: False
cs_mag_aligned_in_flight: False
cs_ev_vel: False
cs_synthetic_mag_z: False
cs_vehicle_at_rest: True
cs_gps_yaw_fault: False
cs_rng_fault: False
cs_inertial_dead_reckoning: False
cs_wind_dead_reckoning: False
cs_rng_kin_consistent: False
cs_fake_pos: False
cs_fake_hgt: False
cs_gravity_vector: False
fs_bad_mag_x: False
fs_bad_mag_y: False
fs_bad_mag_z: False
fs_bad_hdg: False
fs_bad_mag_decl: False
fs_bad_airspeed: False
fs_bad_sideslip: False
fs_bad_optflow_x: False
fs_bad_optflow_y: False
fs_bad_vel_n: False
fs_bad_vel_e: False
fs_bad_vel_d: False
fs_bad_pos_n: False
fs_bad_pos_e: False
fs_bad_pos_d: False
fs_bad_acc_bias: False
fs_bad_acc_vertical: False
fs_bad_acc_clipping: False
reject_hor_vel: False
reject_ver_vel: False
reject_hor_pos: False
reject_ver_pos: False
reject_yaw: False
reject_airspeed: False
reject_sideslip: False
reject_hagl: False
reject_optflow_x: False
reject_optflow_y: False
nsh>
Has somebody managed to make it work?