Hi,
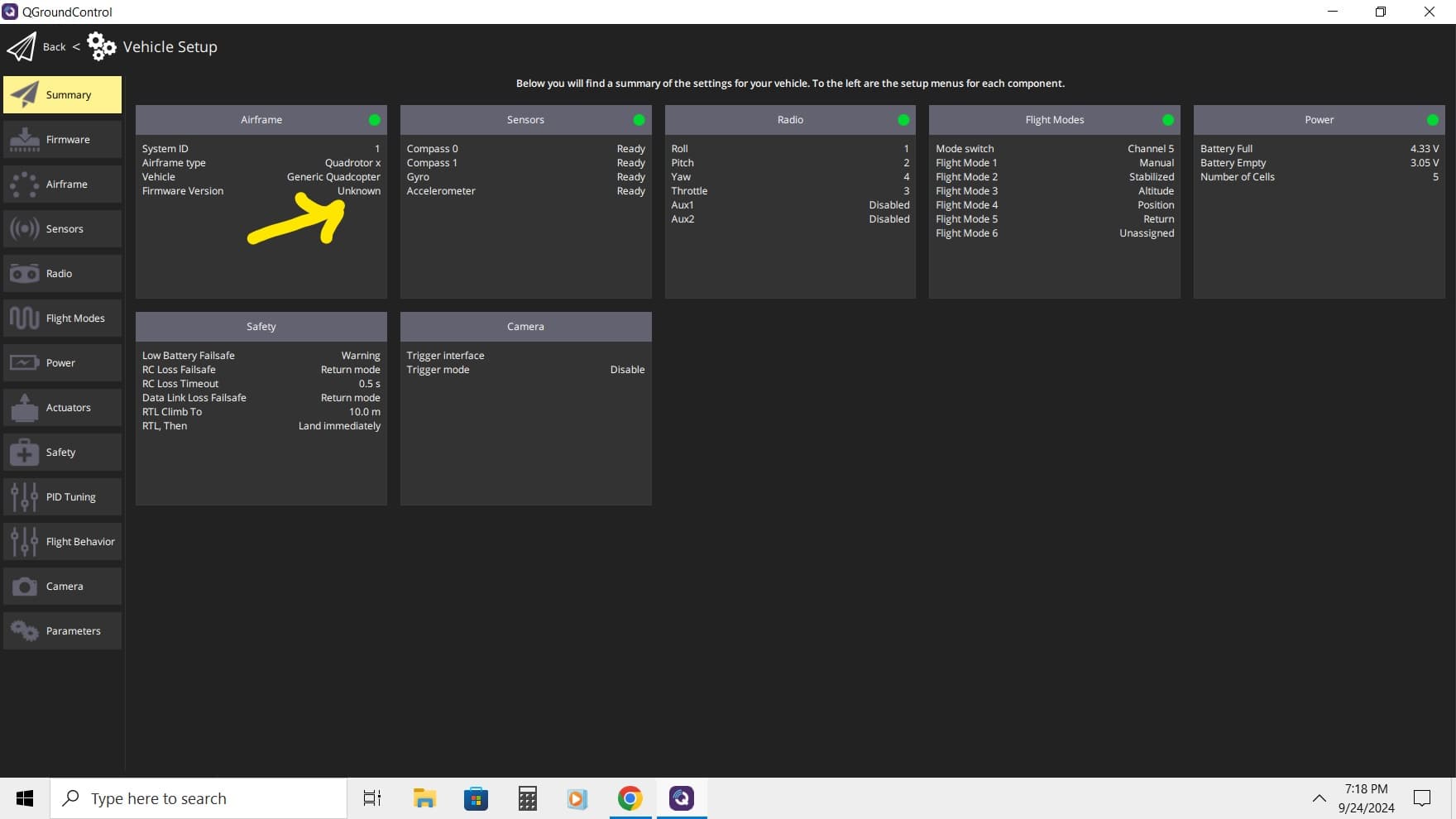
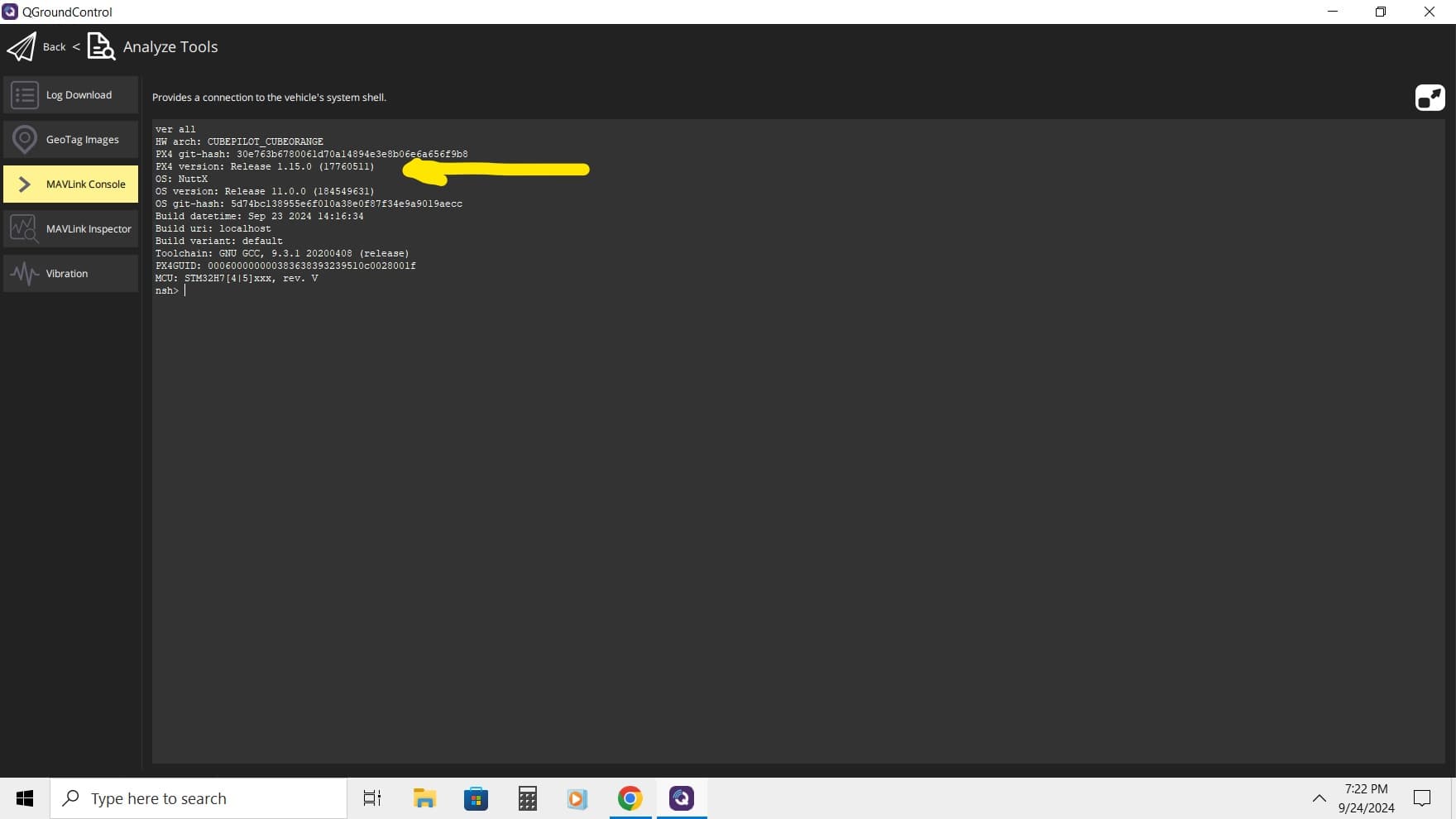
Today I installed the Px4 v1.15 stable release thro QGC v4.4. It looks like GPS is not detected neither thro GPS1 primary nor GPS2 secondary but the quadcopter take off well with my pre tuned PID values created under Px4 v13.3 parameter back up .
So i had to return back to my previous firmware v1.13.3 and the GPS detected immediately.
i also saw that some GPS parameters from v1.13.3 are not present in v1.15 stable.
Anyone with a similar issue or solution …
Having the same issue here but with a PixRacer Pro instead. After flashing to v1.15.0, GPS does not show up in QGC main page and there is no GPS_RAW_INT message present in MAVLink Inspector. After downgrading to v1.14.4, GPS shows up and GPS_RAW_INT message is present
Weirdly enough, when I tried with a Pixhawk 4 on both v1.14.4 and v1.15.0, the same GPS module shows up and has GPS_RAW_INT message present. I just submitted a bug report on the px4 github
Hi,
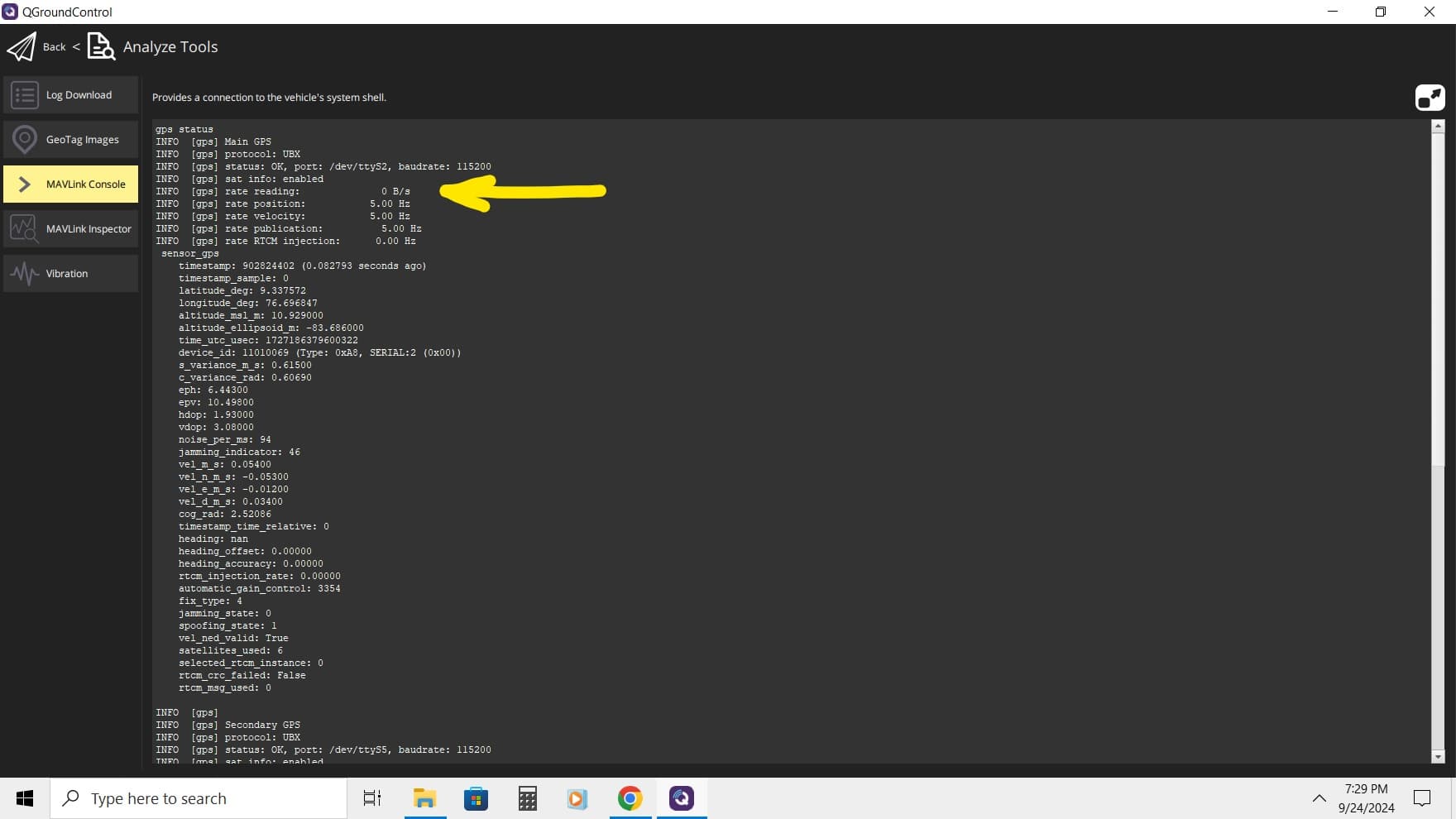
I also see that on Mavlink console v1.15 GPS rate reading is now showing 0 b/s . Earlier on v13.3 it used to show 600b/s or something close. On QGC i see the coordinates !!
GPS1 is assigned by default to add more context. This is unintended in v1.15, so we will be publishing a v1.15.1 release with a fix. Meanwhile, please disable SEP_PORT1_CFG as advised above.
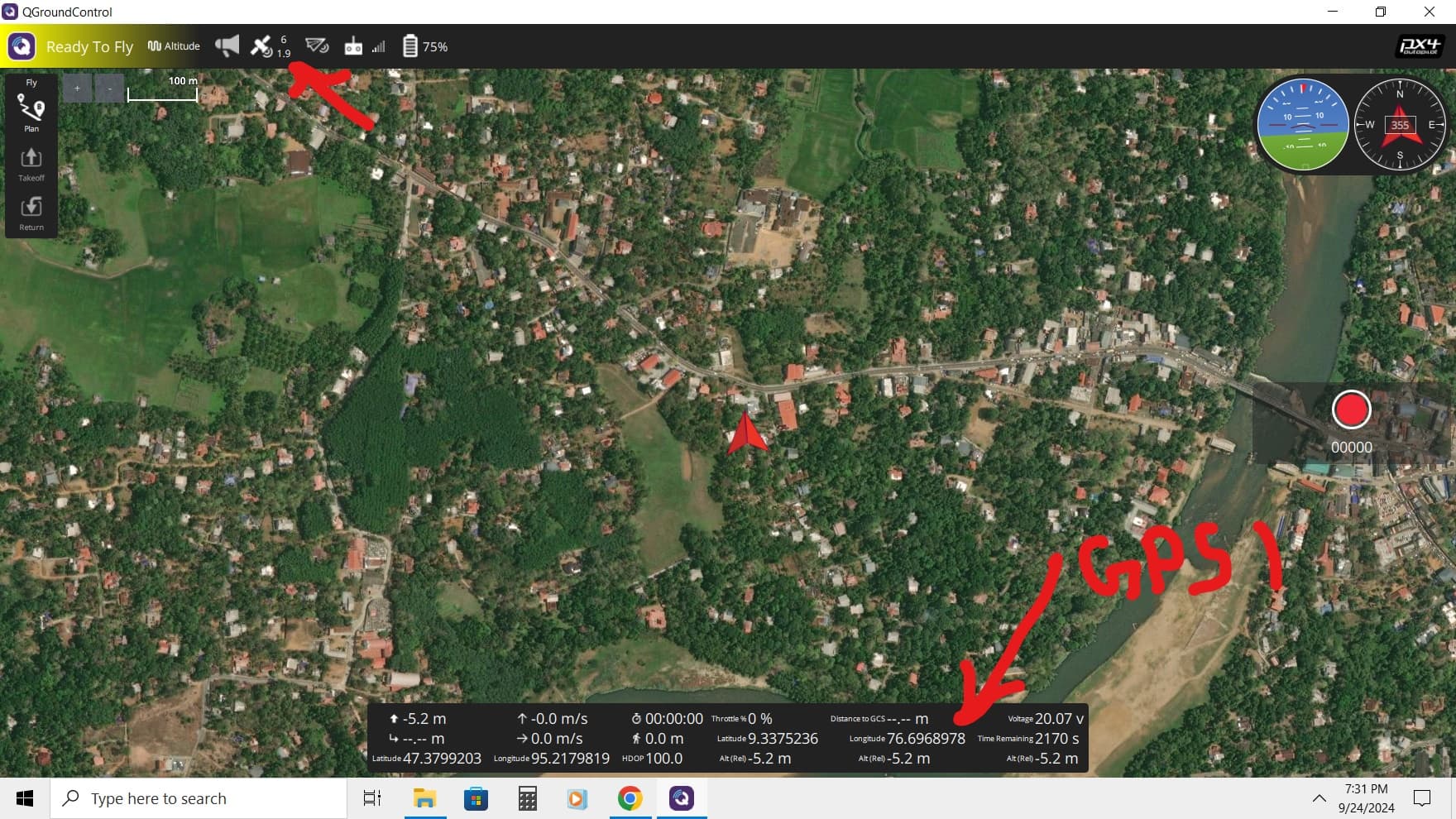
Disabling SEP_PORT1_CFG does solve the issue. GPS 1 and GPS 2 is recognized and i do see the coordinates but the rate reading is not published in mavlink console. But in QGC( v4.4) , I do see the coordinates. I used to see the rate reading in v13.3
Can you please share a log with this problem? make sure SEP_PORT1_CFG is disabled, and your GPS is connected to GPS1
Additionally, and likely unrelated, but since you are upgrading from v1.13, I want to point out that v1.14 introduced breaking changes that are also valid for v1.15, please make sure you read the upgrade instructions for v1.14
Just wanted to add the following to help those who are adjusting v1.15.
Although disabling SEP_PORT1_CFG did work for me in getting the GPS recognized, the data from the GPS ended up being unusable (didn’t realize it until after we started flying). We could arm it and take off even in Position mode but random failsafes were constantly triggered, GPS errors kept popping up. Even GPS spoofing was reported! We had to rollback to v1.14.4 (px4_fmu-v3_default.px4) to regain proper flight (after fixing the hardware that broke when it crashed while trying to fly with v1.15).
VTOL Tailsitter with a CUBE Black, tried v1.15 stable
Disabled SEP_PORT1_CFG as recommended
Here+ GPS connected to GPS1
QGC v4.4.2
Flight in Position mode–Multirotor (didn’t get a chance to try transitioning)
Fixed by rolling back to v1.14.4 (which wasn’t easy since all the “.px4” files for v1.14.4 seem to be gone now that v1.15 is out–luckily a friend of mine has the toolchain already set up for building the needed files).
Hi
Great info. Can you verify thro’ QGC mavlink console ,whether the command "gps status " shows the rate values in bps. …Mine doesn’t but lat/ long coordinates are almost accurate by my GPS standards . I do use a standard Ublox Neo 8M from ReadyToSky brand.
My quad copter is flying ok with a decent take off . If the quadcopter is tilted forward or backward on ground , the respective front rotors or back rotors spin initially, balances the frame pitch and then all the rotors spin for a lift. I kind off find this as an intresting feature…::))
But i did experience sudden jerk during flight when switching from Altitude to Position mode or vice versa. It actually creates a sudden fear in the pilot"s mind if the drone were at VLOS. But after many low altitude flights, i didn’t find any major issues.
My Herelink radio telemetry does switch to Position mode with a red color band if there is no GPS lock and I cannot take off until i have enough satellites to lock and normally turns green before i can lift from ground.
In Altitude mode, i can take off without GPS lock .The QGC on Herelink radio telemetry is running ver4.4.2.
My PIDs from PX4 v13.3 works well in Px4 v15.3 stable.
But i did have a nightmare on Px4 v14.3 where lift off was unstable, noisy flight , battery performance was very poor. I had to abandon Px4 v14.3 !!
I had the same issue. It seems to be present when a GPS is using the UART to communicate. I have patched gps.cpp to fix it. Before:
nsh> gps status
INFO [gps] Main GPS
INFO [gps] protocol: NMEA
INFO [gps] status: OK, port: /dev/ttyS5, baudrate: 921600
INFO [gps] sat info: enabled
INFO [gps] rate reading: 0 B/s
INFO [gps] rate position: 0.00 Hz
INFO [gps] rate velocity: 0.00 Hz
INFO [gps] rate publication: 0.00 Hz
INFO [gps] rate RTCM injection: 0.00 Hz
sensor_gps
timestamp: 1166797117 (0.077381 seconds ago)
timestamp_sample: 0
The fix I did was only partial:
nsh> gps status
INFO [gps] Main GPS
INFO [gps] protocol: NMEA
INFO [gps] status: NOT OK, port: /dev/ttyS5, baudrate: 921600
INFO [gps] sat info: enabled
INFO [gps] rate reading: 1893 B/s
INFO [gps] rate position: 0.00 Hz
INFO [gps] rate velocity: 0.00 Hz
INFO [gps] rate publication: 0.00 Hz
INFO [gps] rate RTCM injection: 0.00 Hz
sensor_gps
timestamp: 104967152 (0.293458 seconds ago)
I have a feeling a chunk of code was accidentally removed. Will look into it later as I would also need to figure out how to submit the patches.