Hi,
I have thinking that since I have a companion computer
(Jetson TX2) with USB3, that could prompt the issue, because I read
http://docs.px4.io/en/log/flight_review.html#gps-uncertainty
USB 3 is known to be an effective GPS jamming source. The **jamming
indicator** should be around or below 40. Values around 80 or higher
are too high and the setup must be inspected.
And there is a new PX4 version V1.9 stable, which I load it and I re calibrate everything again, and I have also enabled the CAL_MAG1_EN
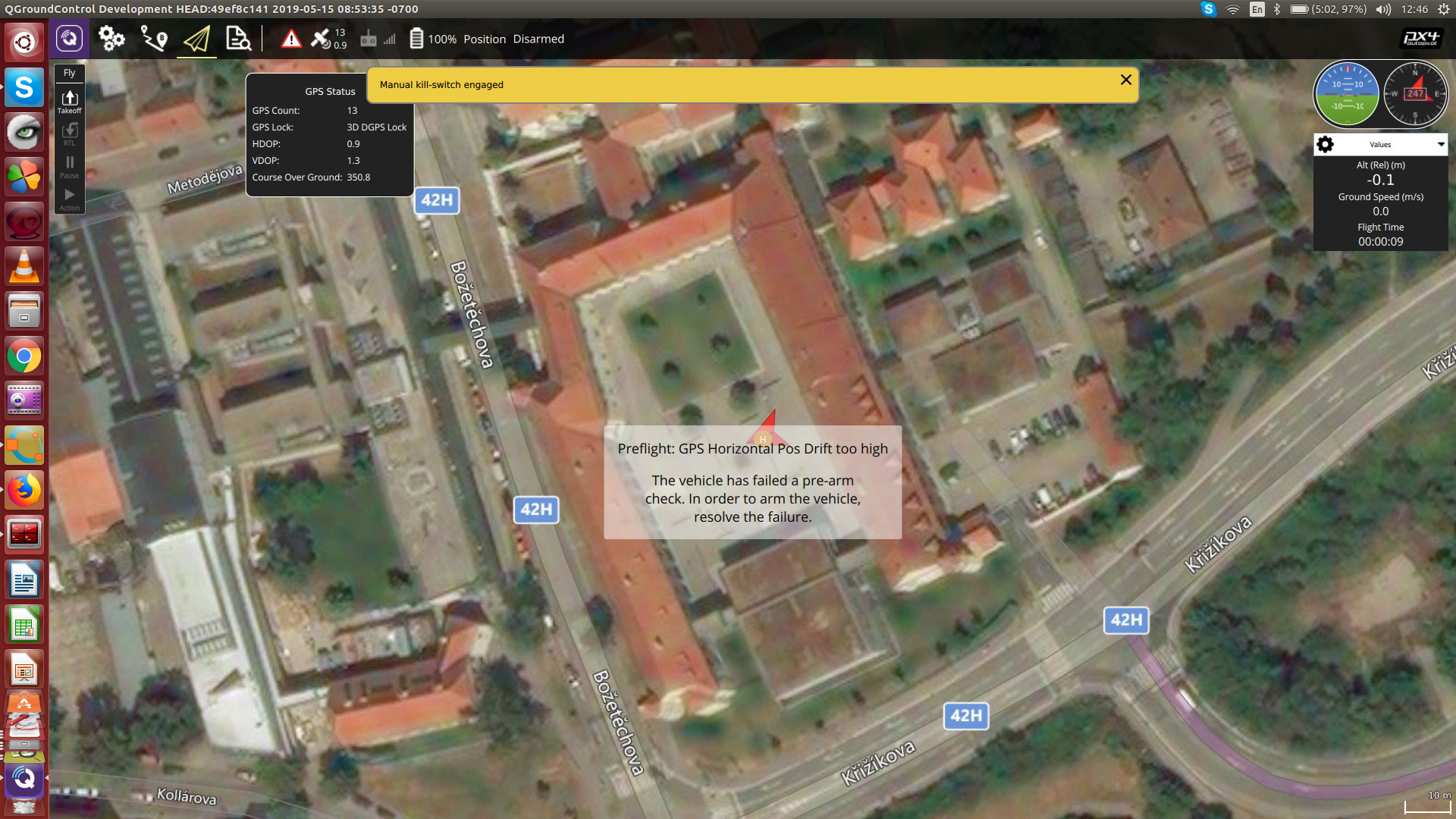
Then I have covered the GPS with aluminum paper as you can see it in the picture
I made some tests in mission and manual mode, with small propellers so the drone did not fly.
And, the GPS position was good and I did not get any warning.
I believe that noise from the JetsonTX2 USB3 was causing the problem.
I have another issue, maybe you could help me 
I use EKF2 and I have Set
SENS_FLOW_ROT to 270 degrees, default
EKF2_AID_MASK to use optical flow and GPS
EKF2_HGT_MODE to use the range finder
The question is:
How can I check that the PX4FLOW sensor is working correctly together with the GPS ?
In other words, I guess that I shall get a position [xyz] that comes from the combination of both the GPS and the PX4FLOW , right?
So far I can see in the mavlink inspector the:
-optical_flow_rad
-local_position_ned