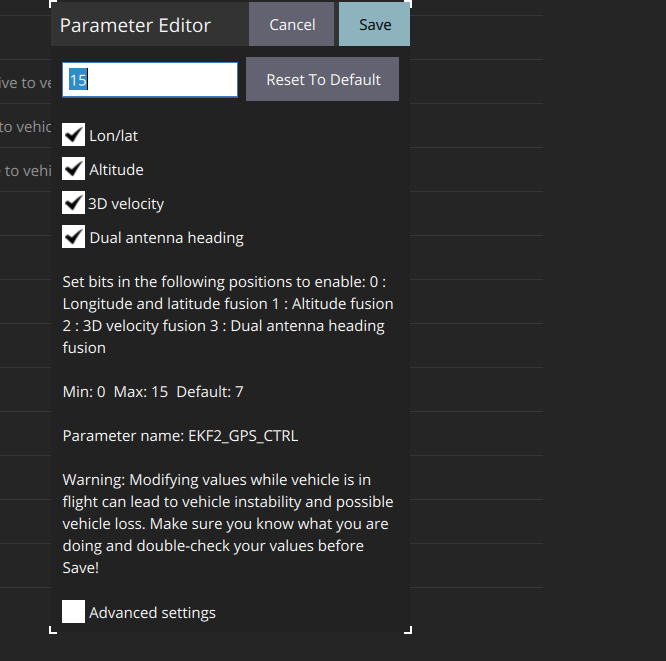
I recently purchased the Holybro H-RTK Unicore UM982 GPS module and enabled GPS-based heading by setting the EKF2_GPS_CTRL parameter to 15. I would like to know how I can verify that the system is actually using GPS data for heading calculations instead of the compass.
What steps or parameters should I check to ensure that the configuration is correct and that the GPS is being used for heading?
I have exactly the same problem. GPS works but cs_gps_yaw shows false. Using UM982 dual antenna setup with latest px4 stable (1.15.2). Did you solve it eventually?
This will be fixed with 1.15.3. I have recently added a few fixes to the release/1.15 branch. If you build yourself from the release/1.15 branch, you already have the fixes.