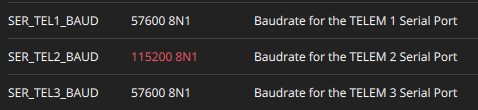
Update: I’m able to make the gimbal move by reducing the baud rate to 9600.
But I’m still encountering warning and error messages. Additionally, I frequently can’t detect the gimbal or take control, resulting in timeouts. How can I resolve this issue?
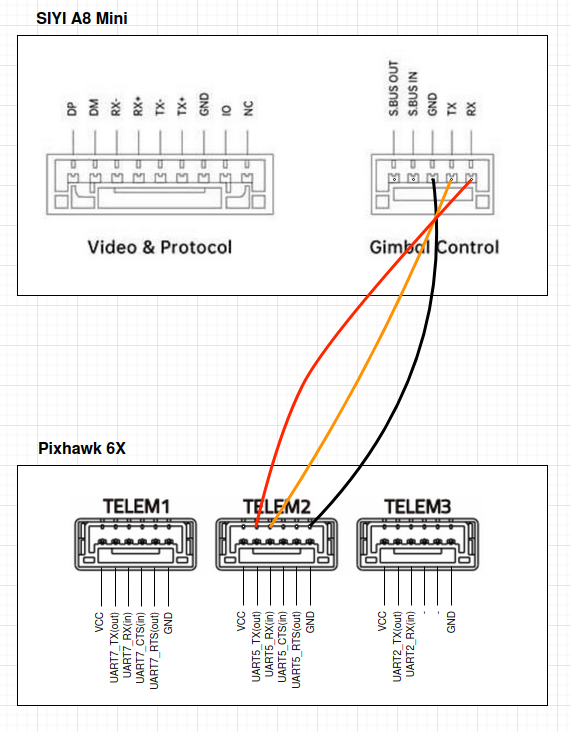
gimbal/build main ± ./gimbal serial:///dev/ttyACM1:9600
[07:48:40|Info ] MAVSDK version: v2.12.2-60-ga428ee99 (mavsdk_impl.cpp:28)
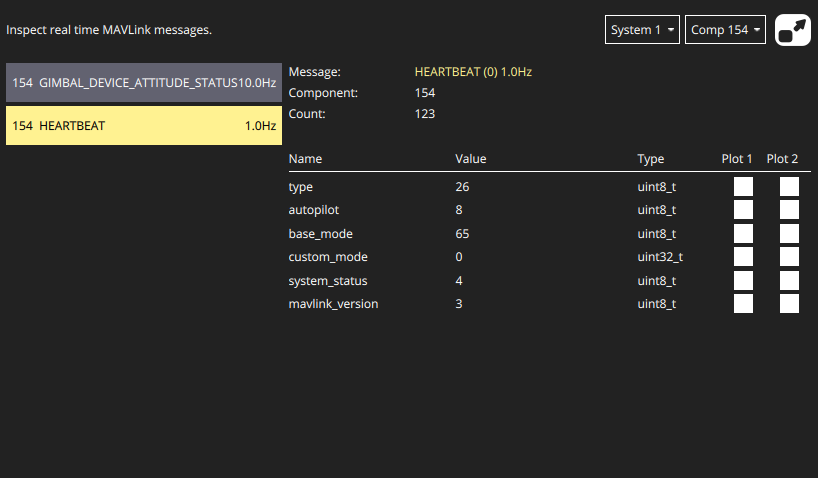
[07:48:40|Debug] New system ID: 1 Comp ID: 154 (mavsdk_impl.cpp:705)
[07:48:40|Debug] Component Gimbal (154) added. (system_impl.cpp:367)
[07:48:40|Debug] Component Autopilot (1) added. (system_impl.cpp:367)
[07:48:40|Debug] Discovered 2 component(s) (system_impl.cpp:510)
[07:48:40|Warn ] Vehicle type changed (new type: 2, old type: 0) (system_impl.cpp:218)
[07:48:40|Debug] MAVLink: info: GCS connection regained (system_impl.cpp:244)
[07:48:40|Warn ] sending again after 0.00782952 s, retries to do: 3 (512). (mavlink_command_sender.cpp:322)
[07:48:40|Warn ] Request was for msg ID: 283 (mavlink_command_sender.cpp:328)
[07:48:40|Warn ] sending again after 0.0180418 s, retries to do: 2 (512). (mavlink_command_sender.cpp:322)
[07:48:40|Warn ] Request was for msg ID: 283 (mavlink_command_sender.cpp:328)
[07:48:40|Warn ] sending again after 0.0281558 s, retries to do: 1 (512). (mavlink_command_sender.cpp:322)
[07:48:40|Warn ] Request was for msg ID: 283 (mavlink_command_sender.cpp:328)
Found a gimbal: SIYI_KEJI by SIYI_KEJ
Use gimbal ID: 1
Start controlling gimbal...
[07:48:40|Warn ] Received ack for not-existing command: 512! Ignoring... (mavlink_command_sender.cpp:290)
[07:48:40|Warn ] Received ack for not-existing command: 512! Ignoring... (mavlink_command_sender.cpp:290)
[07:48:40|Warn ] Received ack for not-existing command: 512! Ignoring... (mavlink_command_sender.cpp:290)
[07:48:41|Warn ] sending again after 0.00902566 s, retries to do: 3 (512). (mavlink_command_sender.cpp:322)
[07:48:41|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:41|Warn ] sending again after 0.0192338 s, retries to do: 2 (512). (mavlink_command_sender.cpp:322)
[07:48:41|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:41|Warn ] sending again after 0.0293835 s, retries to do: 1 (512). (mavlink_command_sender.cpp:322)
[07:48:41|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:41|Error] Retrying failed for REQUEST_MESSAGE command for message: 280, to (1/154) (mavlink_command_sender.cpp:361)
[07:48:41|Debug] MAVLink: critical: Preflight Fail: Press safety button first (system_impl.cpp:244)
[07:48:42|Warn ] sending again after 0.00863228 s, retries to do: 3 (512). (mavlink_command_sender.cpp:322)
[07:48:42|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:42|Warn ] sending again after 0.0188504 s, retries to do: 2 (512). (mavlink_command_sender.cpp:322)
[07:48:42|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:42|Warn ] sending again after 0.0290207 s, retries to do: 1 (512). (mavlink_command_sender.cpp:322)
[07:48:42|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:42|Error] Retrying failed for REQUEST_MESSAGE command for message: 280, to (1/154) (mavlink_command_sender.cpp:361)
[07:48:43|Warn ] sending again after 0.00911547 s, retries to do: 3 (512). (mavlink_command_sender.cpp:322)
[07:48:43|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:43|Warn ] sending again after 0.0193249 s, retries to do: 2 (512). (mavlink_command_sender.cpp:322)
[07:48:43|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:43|Warn ] sending again after 0.0294785 s, retries to do: 1 (512). (mavlink_command_sender.cpp:322)
[07:48:43|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:43|Error] Retrying failed for REQUEST_MESSAGE command for message: 280, to (1/154) (mavlink_command_sender.cpp:361)
[07:48:44|Warn ] sending again after 0.000599139 s, retries to do: 3 (512). (mavlink_command_sender.cpp:322)
[07:48:44|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:44|Warn ] sending again after 0.0108023 s, retries to do: 2 (512). (mavlink_command_sender.cpp:322)
[07:48:44|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:44|Warn ] sending again after 0.0209558 s, retries to do: 1 (512). (mavlink_command_sender.cpp:322)
[07:48:44|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:44|Error] Retrying failed for REQUEST_MESSAGE command for message: 280, to (1/154) (mavlink_command_sender.cpp:361)
[07:48:45|Warn ] sending again after 0.00849083 s, retries to do: 3 (512). (mavlink_command_sender.cpp:322)
[07:48:45|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:45|Warn ] sending again after 0.0187099 s, retries to do: 2 (512). (mavlink_command_sender.cpp:322)
[07:48:45|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:45|Warn ] sending again after 0.0290483 s, retries to do: 1 (512). (mavlink_command_sender.cpp:322)
[07:48:45|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:45|Error] Retrying failed for REQUEST_MESSAGE command for message: 280, to (1/154) (mavlink_command_sender.cpp:361)
Use yaw mode to lock to a specific direction...
Set ROI (region of interested) location...
[07:48:47|Warn ] sending again after 0.0079274 s, retries to do: 3 (512). (mavlink_command_sender.cpp:322)
[07:48:47|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:47|Warn ] sending again after 0.0181533 s, retries to do: 2 (512). (mavlink_command_sender.cpp:322)
[07:48:47|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:47|Warn ] sending again after 0.0283287 s, retries to do: 1 (512). (mavlink_command_sender.cpp:322)
[07:48:47|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:47|Error] Retrying failed for REQUEST_MESSAGE command for message: 280, to (1/154) (mavlink_command_sender.cpp:361)
[07:48:48|Warn ] sending again after 0.000951926 s, retries to do: 3 (512). (mavlink_command_sender.cpp:322)
[07:48:48|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:48|Warn ] sending again after 0.0111356 s, retries to do: 2 (512). (mavlink_command_sender.cpp:322)
[07:48:48|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:48|Warn ] sending again after 0.0212658 s, retries to do: 1 (512). (mavlink_command_sender.cpp:322)
[07:48:48|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:48|Error] Retrying failed for REQUEST_MESSAGE command for message: 280, to (1/154) (mavlink_command_sender.cpp:361)
[07:48:49|Warn ] sending again after 0.00246998 s, retries to do: 3 (512). (mavlink_command_sender.cpp:322)
[07:48:49|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:49|Warn ] sending again after 0.0126767 s, retries to do: 2 (512). (mavlink_command_sender.cpp:322)
[07:48:49|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:49|Warn ] sending again after 0.0228497 s, retries to do: 1 (512). (mavlink_command_sender.cpp:322)
[07:48:49|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:49|Error] Retrying failed for REQUEST_MESSAGE command for message: 280, to (1/154) (mavlink_command_sender.cpp:361)
[07:48:50|Warn ] sending again after 0.00265146 s, retries to do: 3 (512). (mavlink_command_sender.cpp:322)
[07:48:50|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:50|Warn ] sending again after 0.0128141 s, retries to do: 2 (512). (mavlink_command_sender.cpp:322)
[07:48:50|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:50|Warn ] sending again after 0.0229769 s, retries to do: 1 (512). (mavlink_command_sender.cpp:322)
[07:48:50|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:50|Error] Retrying failed for REQUEST_MESSAGE command for message: 280, to (1/154) (mavlink_command_sender.cpp:361)
[07:48:51|Warn ] sending again after 0.00110138 s, retries to do: 3 (512). (mavlink_command_sender.cpp:322)
[07:48:51|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:51|Warn ] sending again after 0.0113147 s, retries to do: 2 (512). (mavlink_command_sender.cpp:322)
[07:48:51|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:51|Warn ] sending again after 0.0214904 s, retries to do: 1 (512). (mavlink_command_sender.cpp:322)
[07:48:51|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:51|Error] Retrying failed for REQUEST_MESSAGE command for message: 280, to (1/154) (mavlink_command_sender.cpp:361)
[07:48:52|Warn ] sending again after 0.000804168 s, retries to do: 3 (512). (mavlink_command_sender.cpp:322)
[07:48:52|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:52|Warn ] sending again after 0.0110133 s, retries to do: 2 (512). (mavlink_command_sender.cpp:322)
[07:48:52|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:52|Warn ] sending again after 0.0211775 s, retries to do: 1 (512). (mavlink_command_sender.cpp:322)
[07:48:52|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:52|Error] Retrying failed for REQUEST_MESSAGE command for message: 280, to (1/154) (mavlink_command_sender.cpp:361)
[07:48:53|Warn ] sending again after 0.00128674 s, retries to do: 3 (512). (mavlink_command_sender.cpp:322)
[07:48:53|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:53|Warn ] sending again after 0.0114748 s, retries to do: 2 (512). (mavlink_command_sender.cpp:322)
[07:48:53|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:53|Warn ] sending again after 0.0216484 s, retries to do: 1 (512). (mavlink_command_sender.cpp:322)
[07:48:53|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:53|Error] Retrying failed for REQUEST_MESSAGE command for message: 280, to (1/154) (mavlink_command_sender.cpp:361)
[07:48:54|Warn ] sending again after 0.00141945 s, retries to do: 3 (512). (mavlink_command_sender.cpp:322)
[07:48:54|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:54|Warn ] sending again after 0.0116402 s, retries to do: 2 (512). (mavlink_command_sender.cpp:322)
[07:48:54|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:54|Warn ] sending again after 0.0218329 s, retries to do: 1 (512). (mavlink_command_sender.cpp:322)
[07:48:54|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:54|Error] Retrying failed for REQUEST_MESSAGE command for message: 280, to (1/154) (mavlink_command_sender.cpp:361)
[07:48:55|Warn ] sending again after 0.00125961 s, retries to do: 3 (512). (mavlink_command_sender.cpp:322)
[07:48:55|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:55|Warn ] sending again after 0.0114693 s, retries to do: 2 (512). (mavlink_command_sender.cpp:322)
[07:48:55|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:55|Warn ] sending again after 0.0217015 s, retries to do: 1 (512). (mavlink_command_sender.cpp:322)
[07:48:55|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:55|Error] Retrying failed for REQUEST_MESSAGE command for message: 280, to (1/154) (mavlink_command_sender.cpp:361)
Back to the center...
[07:48:55|Warn ] sending again after 0.00164125 s, retries to do: 3 (1000). (mavlink_command_sender.cpp:322)
[07:48:55|Warn ] Received ack for not-existing command: 1000! Ignoring... (mavlink_command_sender.cpp:290)
[07:48:56|Warn ] sending again after 0.0020117 s, retries to do: 3 (512). (mavlink_command_sender.cpp:322)
[07:48:56|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:56|Warn ] sending again after 0.0122175 s, retries to do: 2 (512). (mavlink_command_sender.cpp:322)
[07:48:56|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:56|Warn ] sending again after 0.0224287 s, retries to do: 1 (512). (mavlink_command_sender.cpp:322)
[07:48:56|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:56|Error] Retrying failed for REQUEST_MESSAGE command for message: 280, to (1/154) (mavlink_command_sender.cpp:361)
[07:48:57|Warn ] sending again after 0.00257039 s, retries to do: 3 (512). (mavlink_command_sender.cpp:322)
[07:48:57|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:57|Warn ] sending again after 0.0127806 s, retries to do: 2 (512). (mavlink_command_sender.cpp:322)
[07:48:57|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:57|Warn ] sending again after 0.0230142 s, retries to do: 1 (512). (mavlink_command_sender.cpp:322)
[07:48:57|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:57|Error] Retrying failed for REQUEST_MESSAGE command for message: 280, to (1/154) (mavlink_command_sender.cpp:361)
[07:48:58|Warn ] sending again after 0.00321635 s, retries to do: 3 (512). (mavlink_command_sender.cpp:322)
[07:48:58|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:58|Warn ] sending again after 0.0134244 s, retries to do: 2 (512). (mavlink_command_sender.cpp:322)
[07:48:58|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:58|Warn ] sending again after 0.0236237 s, retries to do: 1 (512). (mavlink_command_sender.cpp:322)
[07:48:58|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:58|Error] Retrying failed for REQUEST_MESSAGE command for message: 280, to (1/154) (mavlink_command_sender.cpp:361)
[07:48:59|Warn ] sending again after 0.00393659 s, retries to do: 3 (512). (mavlink_command_sender.cpp:322)
[07:48:59|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:59|Warn ] sending again after 0.0141495 s, retries to do: 2 (512). (mavlink_command_sender.cpp:322)
[07:48:59|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:59|Warn ] sending again after 0.0243578 s, retries to do: 1 (512). (mavlink_command_sender.cpp:322)
[07:48:59|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:48:59|Error] Retrying failed for REQUEST_MESSAGE command for message: 280, to (1/154) (mavlink_command_sender.cpp:361)
[07:49:00|Warn ] sending again after 0.00275385 s, retries to do: 3 (512). (mavlink_command_sender.cpp:322)
[07:49:00|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:49:00|Warn ] sending again after 0.0129514 s, retries to do: 2 (512). (mavlink_command_sender.cpp:322)
[07:49:00|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:49:00|Warn ] sending again after 0.0231291 s, retries to do: 1 (512). (mavlink_command_sender.cpp:322)
[07:49:00|Warn ] Request was for msg ID: 280 (mavlink_command_sender.cpp:328)
[07:49:00|Error] Retrying failed for REQUEST_MESSAGE command for message: 280, to (1/154) (mavlink_command_sender.cpp:361)
Stop controlling gimbal...
Finished.