Hi,
I am trying to make a gimbal work with PX4. It uses some custom protocol, so i need a link between my autopilot and the gimbal, and I intend to use some microcontroller for that when I get to it.
For now I am trying to figure out how to see the QGroundControl gimbal commands in the GUI, and that is where I am stuck.
I am running PX4 v1.13, so not really the latest, but I tried on master too anyway, and I get the same output.
My parameters for the gimbal are:
MAV_1_CONFIG = TELEM2
MAV_1_FORWARD = Enabled
MAV_1_MODE = GIMBAL
MNT_MAV_SYS_ID = 1
MNT_MAV_COMPID = 154
MNT_MODE_IN = Mavlink Gimbal Protocol V2
MNT_MODE_OUT = Mavlink Gimbal Protocol V2
I have a USB to Serial converter connected to TELEM2 port on a Cube Orange, and I have a small CPP program running on my PC.
I tried to implement things myself, and cleaned up with Claude, which also added some things according to what it thinks the Gimbal protocol needs.
It is sending heartbeats, responds when autpilot request gimbal information, then sends attitude, and all that.
And when I write in Mavlink console for example
gimbal test pitch 90,
i get and process those command in the program.
Problem is why QGC is telling me something is wrong with my gimbal device and never launches the part of GUI for retracting, turning, etc.
I get this output:
9.537 - debug: new potential gimbal manager component: 1 (qgc.gimbal.gimbalcontroller:unknown:0)
9.537 - debug: _requestGimbalInformation( 1 ) (qgc.gimbal.gimbalcontroller:unknown:0)
9.673 - warning: _handleGimbalManagerInformation for invalid gimbal device: 0 , from component id: 1 (qgc.gimbal.gimbalcontroller:unknown:0)
10.499 - debug: _requestGimbalInformation( 1 ) (qgc.gimbal.gimbalcontroller:unknown:0)
10.502 - warning: _handleGimbalManagerInformation for invalid gimbal device: 0 , from component id: 1 (qgc.gimbal.gimbalcontroller:unknown:0)
11.488 - debug: _requestGimbalInformation( 1 ) (qgc.gimbal.gimbalcontroller:unknown:0)
11.490 - warning: _handleGimbalManagerInformation for invalid gimbal device: 0 , from component id: 1 (qgc.gimbal.gimbalcontroller:unknown:0)
12.879 - debug: _requestGimbalInformation( 1 ) (qgc.gimbal.gimbalcontroller:unknown:0)
12.883 - warning: _handleGimbalManagerInformation for invalid gimbal device: 0 , from component id: 1 (qgc.gimbal.gimbalcontroller:unknown:0)
13.494 - debug: _requestGimbalInformation( 1 ) (qgc.gimbal.gimbalcontroller:unknown:0)
13.496 - warning: _handleGimbalManagerInformation for invalid gimbal device: 0 , from component id: 1 (qgc.gimbal.gimbalcontroller:unknown:0)
14.495 - debug: _requestGimbalInformation( 1 ) (qgc.gimbal.gimbalcontroller:unknown:0)
14.498 - warning: _handleGimbalManagerInformation for invalid gimbal device: 0 , from component id: 1 (qgc.gimbal.gimbalcontroller:unknown:0)
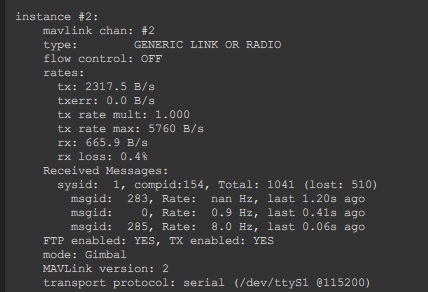
And this is that i see in Mavlink console:

If anyone has any advice, I would appreciate it.