Hello everyone,
I am having a hard time getting a Siyi A8 Mini Gimbal Camera to work with PX4 v1.14.3 Stable. The Gimbal has been updated to latest firmware and is connected via UART to Telem2 on a Pixhawk 6x.
The parameters used are:
MAV_1_CONFIG: “TELEM2”
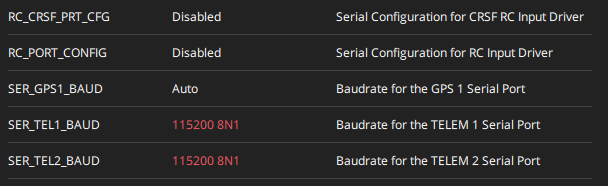
SER_TEL2_BAUD: 115200 (complying with siyi specification)
MAV_1_MODE: “Normal” and tried “Gimbal” aswell
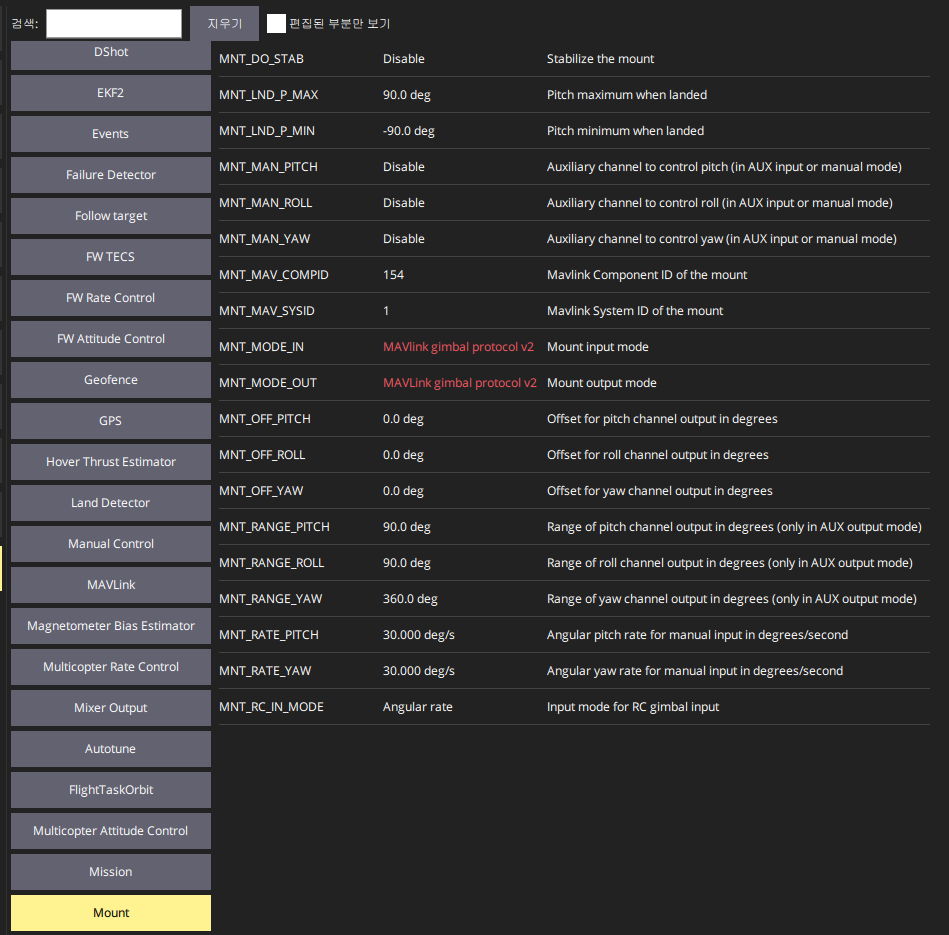
MNT_MODE_IN / OUT: Mavlink v2 and tried v1 aswell
I do get Heartbeart Messages from the gimbal at 1Hz and the FC does send out messages at 115200 baud when probed with an oscilloscope.
The setup does work with Ardupilot though. I can run the MAVSDK “gimbal” example and can move the gimbals direction with the latest QGC in the video view.
Unfortunately the same doesn’t work with PX4. I also cannot move the gimbal directly from NuttXShell via the gimbal application.
So if anyone could point me in the right direction i would be very glad.
Have you tried upgrading the gimbal firmware on your A8 to the latest version (maybe 0.3.7)? The PX4 version is 1.14? I had the same issue, but solved it with the above two.
Hi,
Yes, the gimbal firmware is 0.3.7 and PX4 is 1.14.3.
Unfortunately this didnt resolve the issue for me…
Is MAV_1_FORWARD 1? If not, I’ll check the vehicle tomorrow and share the parameters. From my memory, MAV_1_MODE is NORMAL and MNT_MODE is mavlink v2.
Hi @Semyorka,
I tried it again on v.1.14.0 but still no success so far.
MAV_1_FORWARD is enabled, yes.
I noticed an issue with the Telemetry Link on Telem1/MAV0 when Flow Control is enabled on both Ports (Telem1/2), meaning the link does not connect.
Could you tell me your Flow Control and Forwarding Settings if you have a working configuration?
Many Thanks!
Oh, I was running it on 14.3 too. That was a typo when I wrote 14.
First, let me say that I was successful in getting the PX4 and A8 MINI to connect and even control via the MAVSDK example on the ground. FC worked successfully with cube orange, pixhawk v6x, pix32v6, and cuav x7.
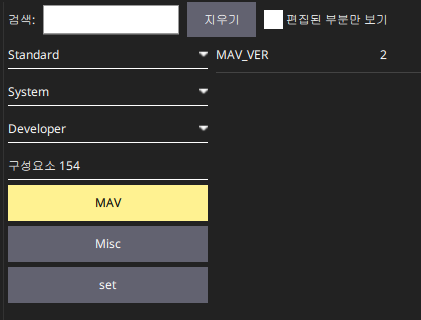
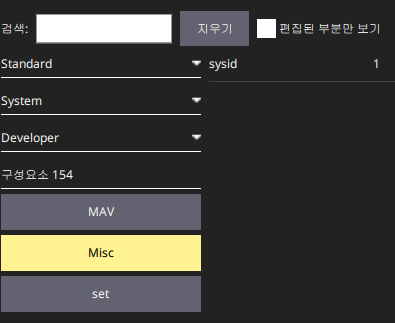
First, check to see if the FC parameter window exposes the Component 154 entry at the very bottom. If you do see the Component 154 window, set set_att_en to 1 inside that window. The rest of the parameters are probably the same as mine.
I’ll look at the parameters later when I have access to the airframe and give you more details.
@Semyorka thanks alot.
I cant quite follow you here. Where do i set “set_att_en” in PX4? I use QGC and didnt see that window nor found the parameter in params.
In mavlink inspector i do see the gimbal as component 154 and it does send heartbeats and attitude status messages.
The MAVSDK example subscribes to the gimbal atttitude and i can see them being printed by the gimbal example but unfortunately the gimbal still does not move.
set_att_en is at component 154 window.
And below is my parameter.
I connected A8 at Telem2/MAV1.
I hope my reply helps you solve your problem.
set_att_en did solve the issue, it was set to 0 before. Took me a moment to find it in QGC, because it only showed up after selecting Toos → Refresh and i also couldn’t find it in the docs.
Many thanks for your extensive help @Semyorka !