Micro OSD V2 with my Pixhawk 4 mini, the flight mode doesn’t change it stays at mod:STAB
Tried everything for hours and hours, even installed everything again but eventually everything works fine but only the mode indicator on the OSD is not changing at all.
This is the anwer from Holybro:
Hello,
We have had it tested and this issue does happen when pixhawk4mini is running PX4 while it is running ardupilot, the flight mode can be changed properly. So it has nothing to do with the OSD but is a bug with PX4.
It is recomended you go discuss.px4.io and submit this issue.
I finally got to this today. Been crazy busy, sorry.
Hmm, I see PX4 has come a long way since I last used it. Log Muncher is replaced by Flight Review. Very nice
The thing is, I need to run a TLog (telemetry log) into MavToPass to see what is happening. Unless I can extract a TLog from your .ulg files, but I don’t have enough time to research this right now.
Thanks for the answer, but for what I read is this specific for Frsky receivers and Mavlink.
I use an sbus Futaba receiver, and the telemetry information should go to an OSD, can you please explain how this is working on an OSD?
I’m not sure if it’s compatible but maybe look into Night Ghost’s fork and see if it’ll work better for you. It’s what I’ve used but with just a generic MinimOSD board. This is the Github files.
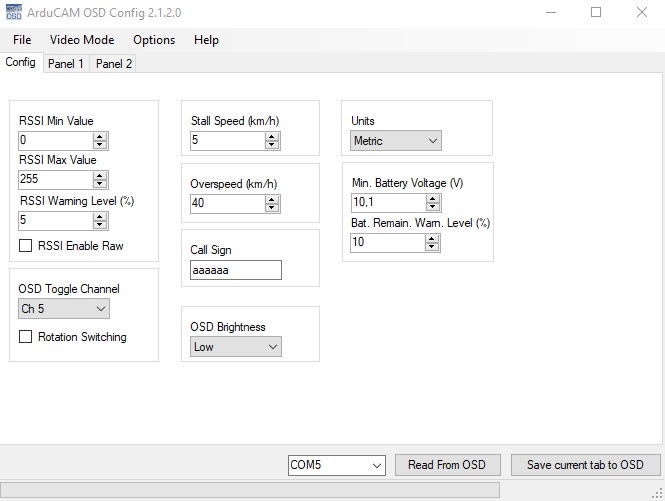
Hi Ojwhaaa_Ojwhaaa, i red that you use Micro OSD V2 with Pixhawk 4 mini. I mean that is an Holybro QAV250 kit like mine. I have to ask kindly ask you wich setting you set for OSD ( i think you have FPV google). I have same hardware of you with osd link to Uart port but i can not receive any telemetri info on the google. I se only “waiting heartbit signal”. Can you help me?
Hi Mauro, You can get any UART port from the Pixhawk, but if telem1 is available it’s the easiest because I think MavLink is already enabled by default.
You can use this connection scheme: Minim OSD Quick Installation Guide — Copter documentation
I can pull the parameters from the Pixhawk if you like, please let me know. I didn’t get the mode problem fixed by the way, it’s a firmware issue and I still hope a developer solves this one day…
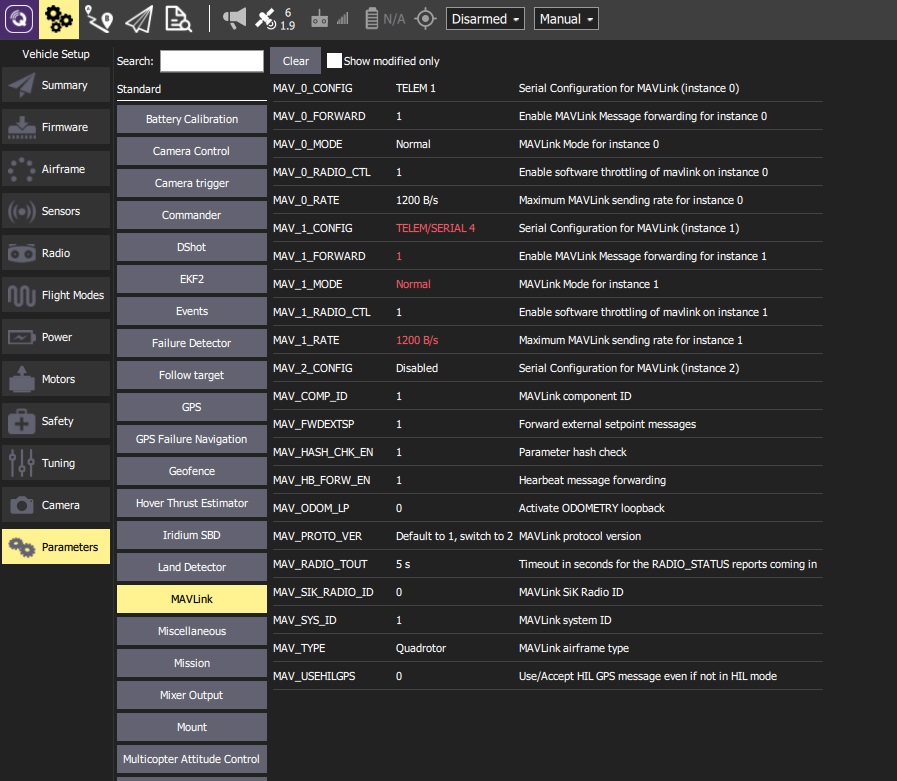
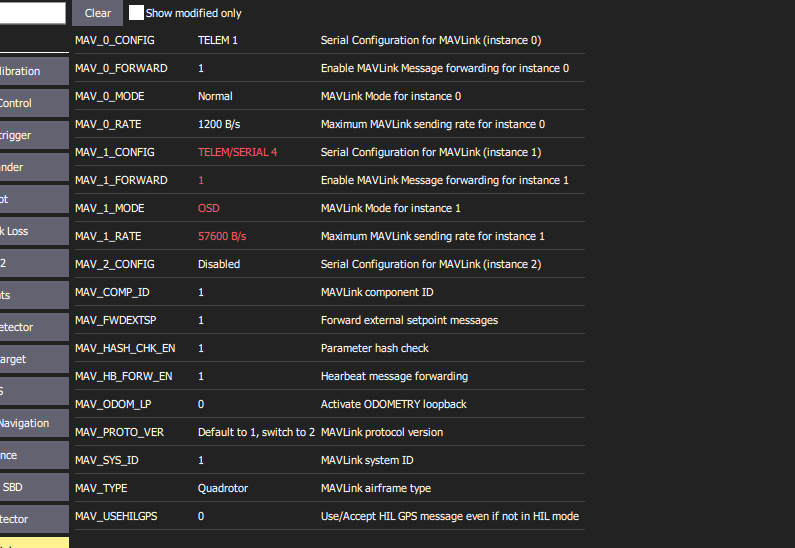
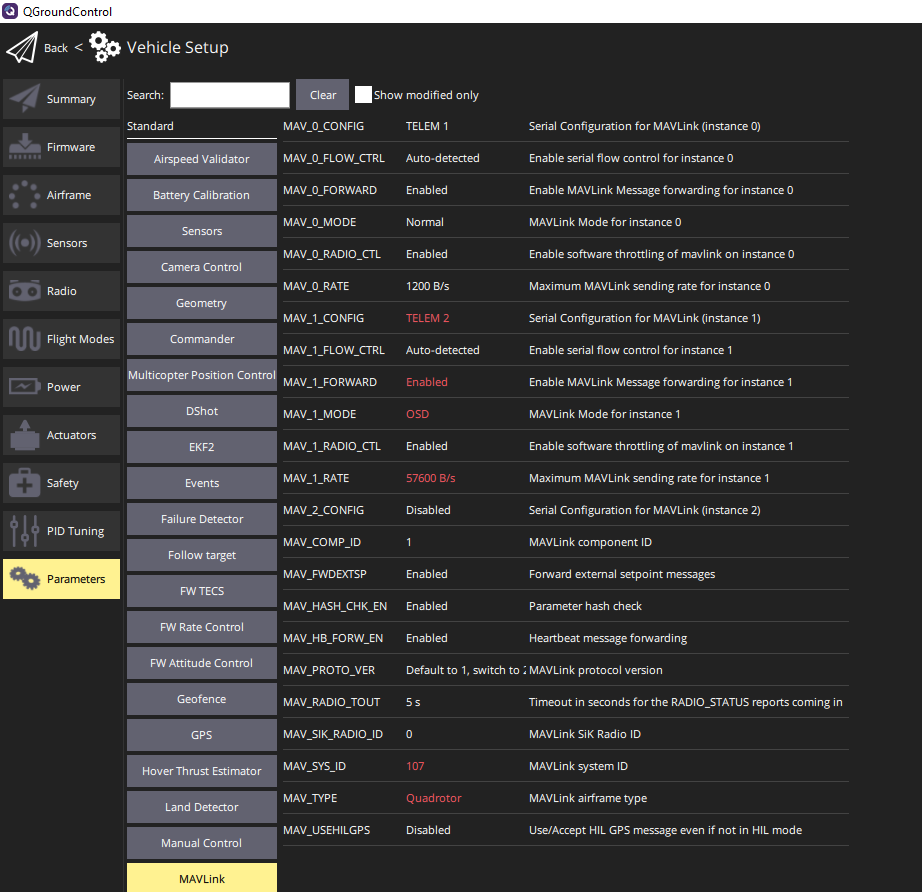
I use the spare UART port (TELEM/SERIAL 4, MAV_1_ ) for the OSD.
i set the parameter like these (see picture) and now works. Also i double check TXRX cable of my Atlat v2 vtx and Pixhawk 4 mini uart port are not inverted.
Anyway i have same problem of you about flight mode that does not change. Probably also other parameter are not in line with the telemetry send directly to GS. I have to verify.