Hi Mauro, You can get any UART port from the Pixhawk, but if telem1 is available it’s the easiest because I think MavLink is already enabled by default.
You can use this connection scheme: Minim OSD Quick Installation Guide — Copter documentation
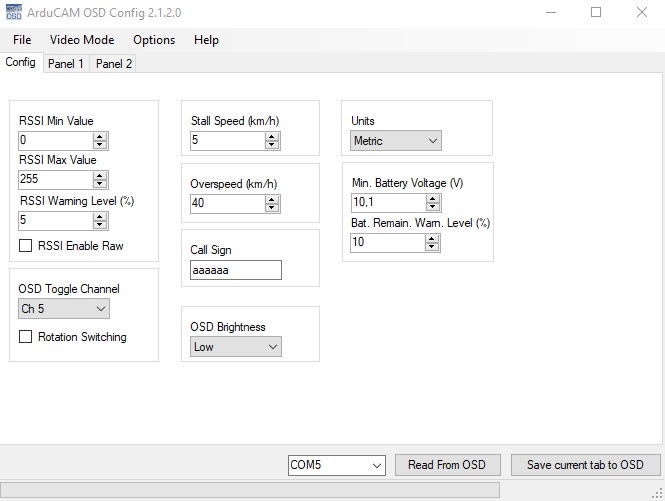
I can pull the parameters from the Pixhawk if you like, please let me know. I didn’t get the mode problem fixed by the way, it’s a firmware issue and I still hope a developer solves this one day…
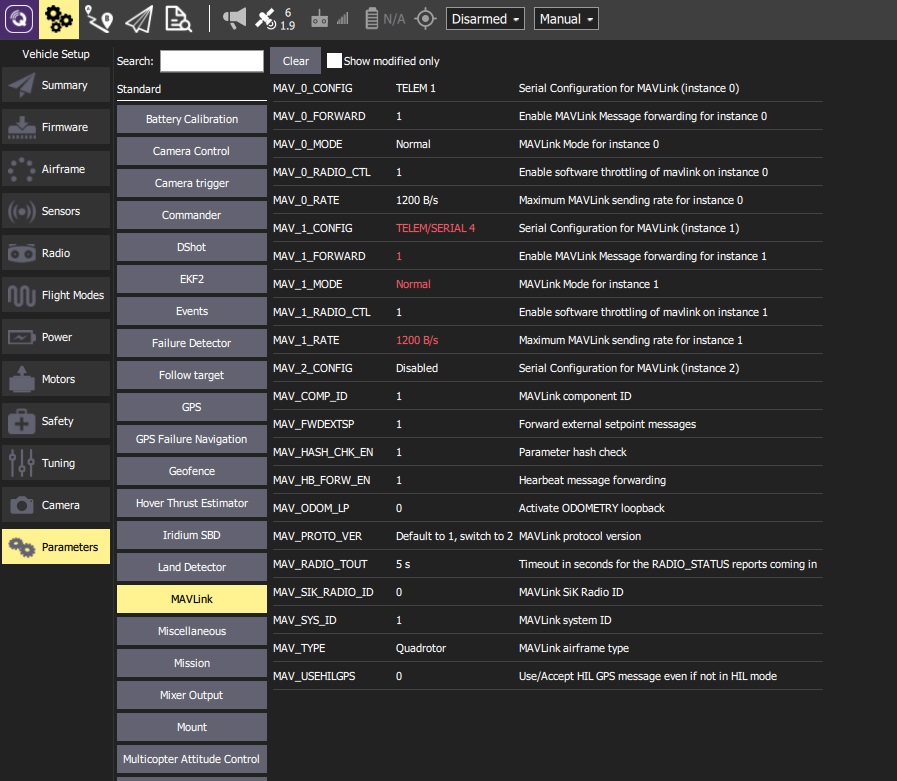
I use the spare UART port (TELEM/SERIAL 4, MAV_1_ ) for the OSD.