Hi guys, i have a problem with my Holybro Micro OSD and mini Pix4. Using Fatshark fpv google, i have an error on the display: “Waiting for Mavlink heartbeat”. double check pdf instruction of the OSD, there are some parameters to set in Mission Planner , but not the same in QGC. How can i set right parameter in order to allow the correct use of OSD display?
Telemetry antenna is linked to Tel port 1 and osd on UART port of miniPix4.
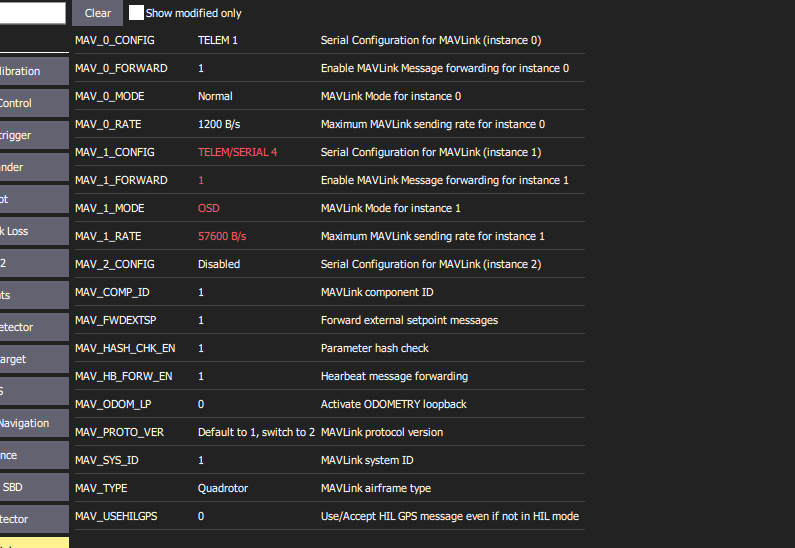
Maybe something in here can help:
Many thank! but do you know is it necessary convert via QGC parameter UART port to a Tel2 also?