Hello,
I wanted to ask some questions about the connections to be made with Pixhawk 2.4.8 (sorry, but I’m new).
1- If for example I have a remote control with 10 channels and a receiver with 6 channels, to that
I thought I understood that if I use the S-BUS port I can use them all, how can I manage the remaining channels?
For example (firefly 6s) how do I connect a gimbal to channel 7, or an action cam with photo control remotely to channel 8?
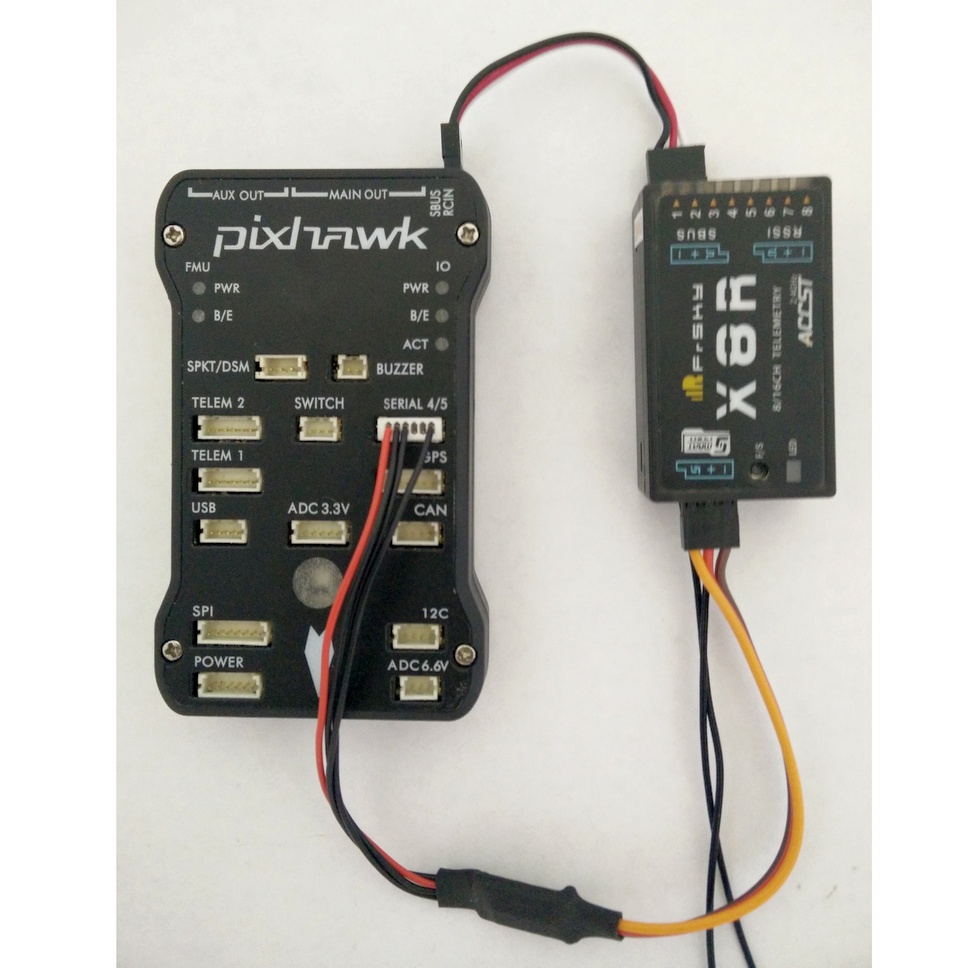
2- If I have a receiver with integrated telemetry as FRSKY X8R, do I have to insert the cable on TEL.2 or on the 4/5 serial port?
Or should I buy a separate telemetry card to put on TEL.1? Can the OSD put it in both cases?
First, make sure you bind your X8R in Mode 4 (D16) by putting a jumper between signal pins 1 & 2 and 3 & 4. Once it binds, power down, remove jumpers then power back up. This will now give you 16 channels to use; 1-8 “virtual” channels that the Pixhawk can use and 9-16 “physical” channels on your X8R that you can directly control servos. So in your case, you plug your gimbal signal wire to Port #1 of the X8R and program your Tx Mixer to Channel 9.
Usually TELEM1 unless you have a Telemetry radio connected there, then use TELEM2.
From the looks of it in the photo, you have a Craft & Theory cable which will work for ArduPilot. But if you’re using PX4 stack, then read up on how to use Yaapu LUA for a very comprehensive telemetry screen on your Tx.
Yes, you can have both. The 3DR Telemetry radio sends it your PC or tablet running QGroundControl or Mission Planner and the X8R SPORT will transmit to your Tx. See my demo on a Jumper T16.
Actually in PX4 v1.9.2 you can assign it to whatever serial port you want.
You’ll need a MinimOSD that will either plug into one of the TELEM ports or cross-wired with a 3DR Telemetry radio.
Perfect, now I have everything clearer. Thank you so much for your patience and kindness, I don’t understand why certain things are not explained for noob like me.