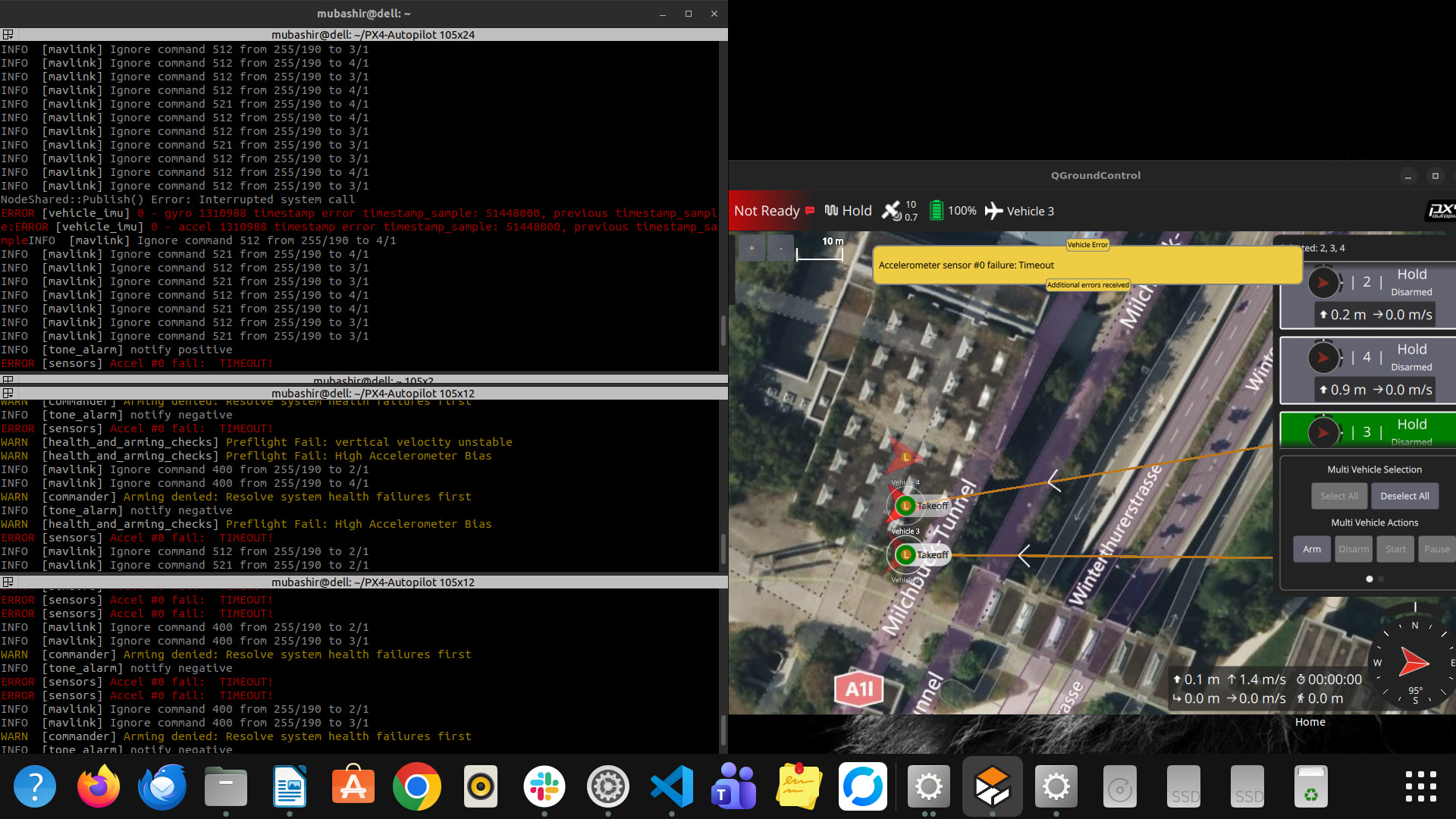
I am working on swarm uavs doing initial testing on gz_x500. I am spawning 3 x500; they connected with QGC, but when try to upload waypoint from qgc and try to fly in mission mode, the last one automatically takes the waypoint from the first one, and facing the following error:
Hight acc0
Yaw estimation error etc
I am launching sitl setup as follow.
terminal-1
PX4_SYS_AUTOSTART=4001 \
PX4_GZ_WORLD=default \
PX4_GZ_MODEL=x500 \
PX4_GZ_MODEL_POSE="0,10,0,0,0,0" \
./build/px4_sitl_default/bin/px4 -i 1
terminal-2
PX4_GZ_STANDALONE=1
PX4_SYS_AUTOSTART=4001 \
PX4_GZ_WORLD=default \
PX4_GZ_MODEL=x500 \
PX4_GZ_MODEL_POSE="0,20,0,0,0,0" \
./build/px4_sitl_default/bin/px4 -i 2
terminal-3
PX4_GZ_STANDALONE=1
PX4_SYS_AUTOSTART=4001 \
PX4_GZ_WORLD=default \
PX4_GZ_MODEL=x500 \
PX4_GZ_MODEL_POSE="0,30,0,0,0,0" \
./build/px4_sitl_default/bin/px4 -i 3