Hi, I’m trying to simulate multiple drones using PX4 and Gazebo-classic, connected to QGroundControl.
The test environment includes two vehicles: a generic plane and a Typhoon H480 quadcopter.
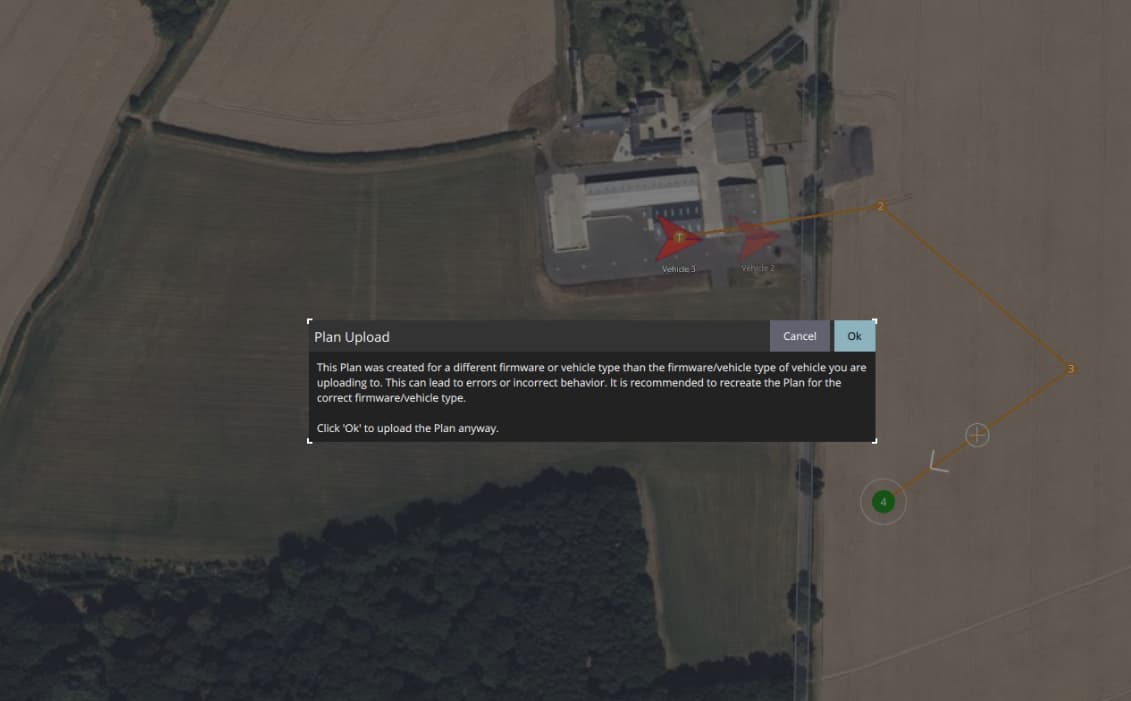
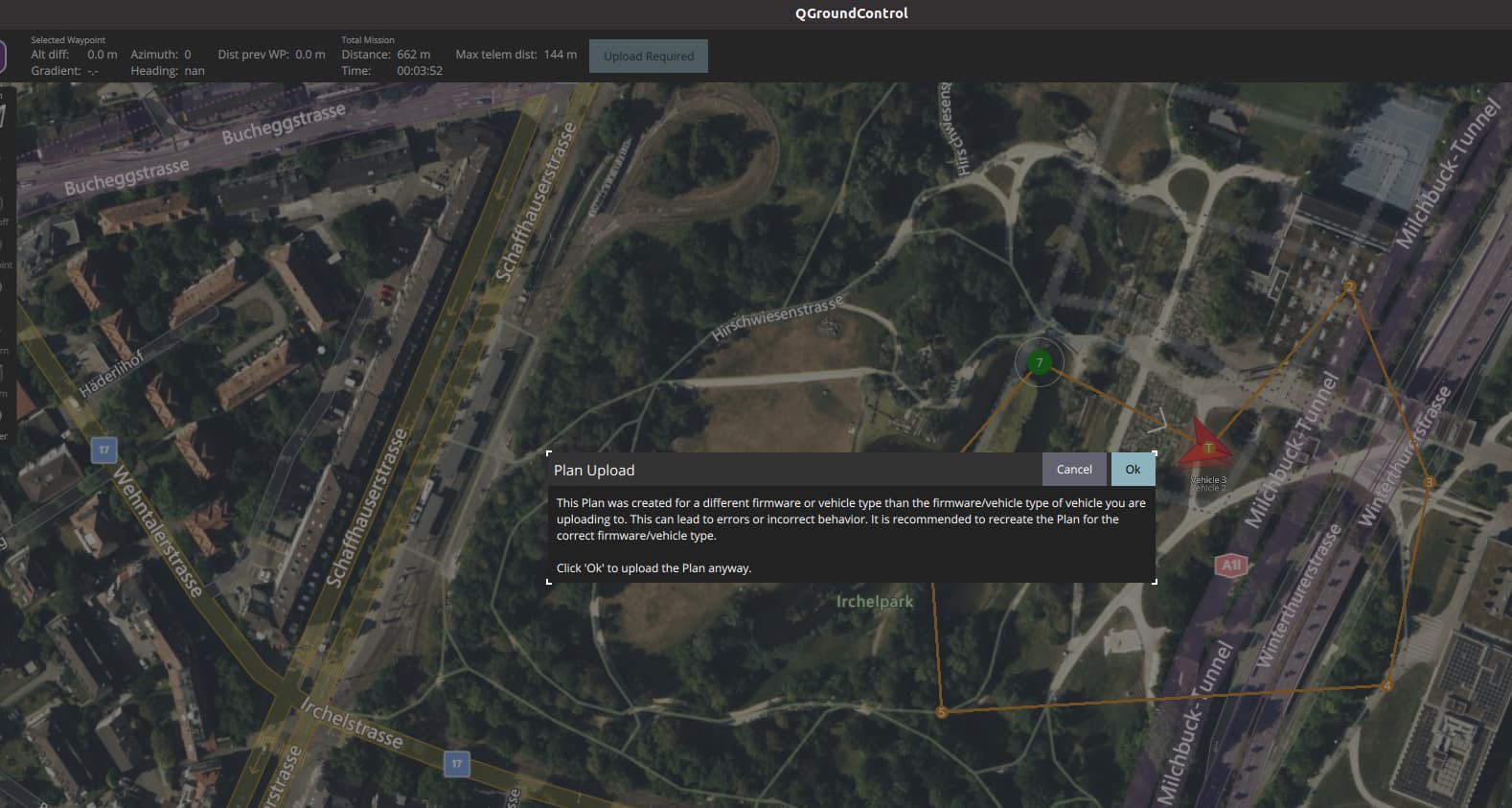
When I create and upload a plan for the Typhoon H480 quadcopter and then switch to the plane, QGroundControl does not recognize the vehicle type correctly. As a result, the plan intended for the plane is created as if it were for the quadcopter, leading to a conflict between the two
Hi, thank you for the support. here is my spawn command
/Tools/simulation/gazebo-classic/sitl_multiple_run.sh -t px4_sitl_default -s typhoon_h480:1,plane:1 -n 2
then i open GQroundControl and it auto connect to the gazebo simulator with 2 drone.
next, in the first drone “plane” i created a plan mission then upload to to droncontroller, thing is okay. then i switch to the second drone “typhoon h480” then i create other mission plan for this drone, but for now, it seem there are something wrong with QGC when i swtich vehicle. the QGC plan create recognize the firmare of the Fixedwing instead of the H480 drone. it cause the mission created conflict as the image here. the QGC report this error