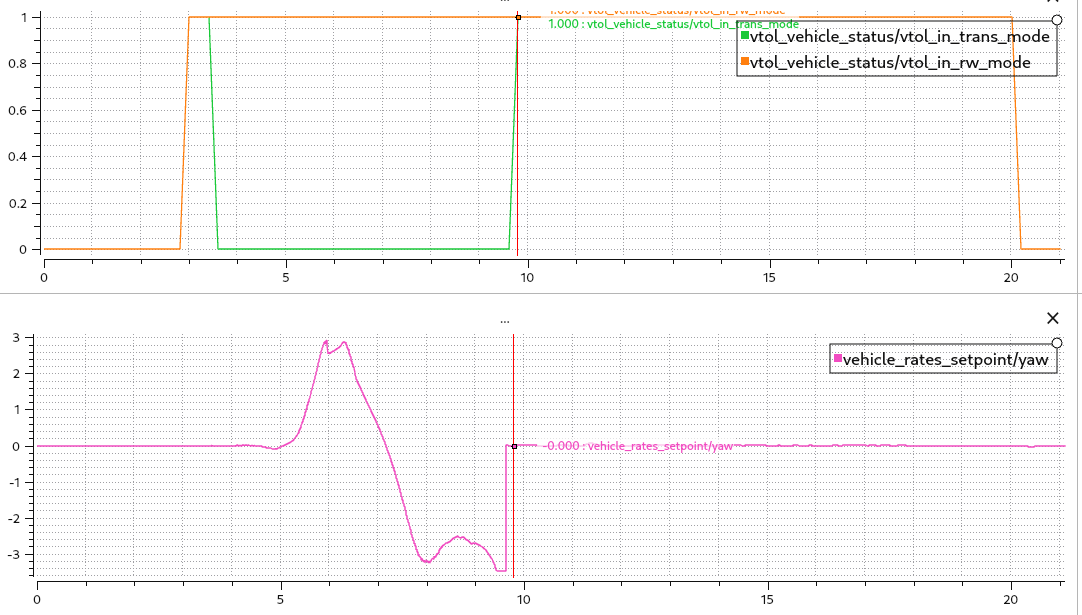
I built a VTOL ranger using a cube orange on PX4 firmware 1.12.3.I have gotten to hover tests, where the vehicle responds well in roll and pitch, but does not respond at all in yaw and just spins. I have checked that the motors rotate in the right direction, and that the frame itself is not broken. The yaw rate setpoint does not make any sense to me, it is either 0 or max value, no inbetween. Also the estimated yaw does not even try to follow the setpoint sometimes.
I have also tried playing around with the PIDs but to no avail. I will attach a bunch of logs of test flights. Could this be due to a faulty RC transmitter or is it something stupidly simple?
The drone is trying to turn but it seems that has almost no yaw authority. It could be that the rotors are not aligned properly, creating an opposite yaw torque.
Make sure the rotors are slightly tilted in the direction where they would created more yaw torque when producing more thrust to increase the yaw authority.
Hi @bresch,
Thank you for the reply. I will look into tilting the motors, but can you explain why the yaw rate setpoint is vastly different from roll and pitch setpoints? The yaw rate setpoint is 0 value or max value and that should not be the case right?