At start of transition vehicle starts yawing right. Aborted the transition but the vehicle couldn’t stabilize itself because of big yaw error. Had a hard landing. max yaw rate is 20, max roll and pitch rates are 120. Couldn’t figure out why the vehicle couldn’t stabilize itself.
So, I don’t get any response from anyone in this forum. So having hard times fixing my problems with the PX4 firmware. I guess that is it. I will try ardupilot.
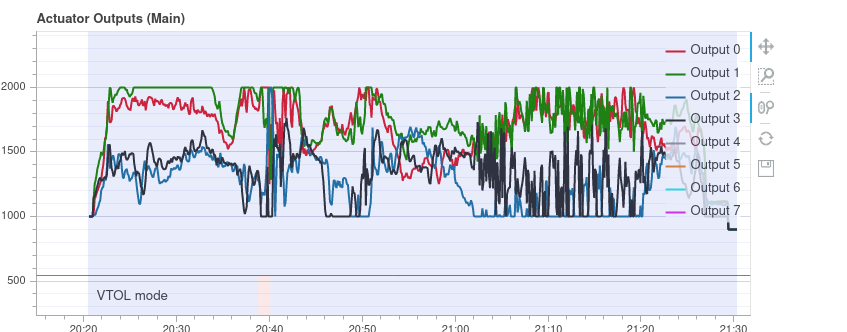
changing yaw related to wind or horizontal propeller Coriolis force effect. but autopilot couldn’t control yaw. yaw angular rate setpoint is zero but actuator_control_0 yaw show it changed for controlling yaw angle.
In general it doesn’t really make sense to limit the max yaw rate, yaw should rather be tuned by adapting MC_YAW_P (reducing it will lead to less yaw rate demanded). For VTOL I have that one usually at around 1.5.
Limiting the rate can make the control loop unstable (it will always be in saturation if limited to only 20° e.g.).
@dayjaby how does your vehicle perform in pure hover flights? Do you always have this large asymmetric load on the motors? If it’s a custom built vehicle, you may want to consider to increase the tilt on the motors to increase yaw authority.
after changing VT_TILT_TRANS from 0.0 to 0.5. Apart from that we already had a measurement of 5m/s airspeed (instead of -5m/s as last time) before initiating the transition.