When I takeoff in position mode using transmitter I see a slight YAW and once I correct it and leave sticks it hovers perfectly. But when I tried to takeoff using takeoff mode in QGC the UAV takeoff but with 35 degrees and hovers perfectly.
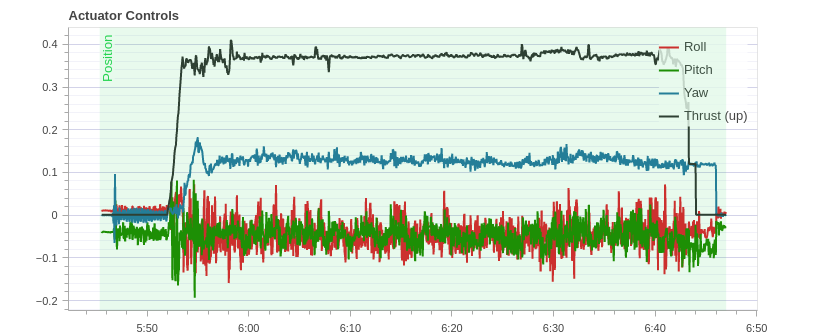
I believe the log will show two motors (one access) spins more than the other two because it’s a bit warmer than the other access motors and I can’t see any mechanical issues causing this!
Upload your flight log, that might make it easier to determine. But based on what you just said, it might be something as simple as one of your motors is not completely horisontal.