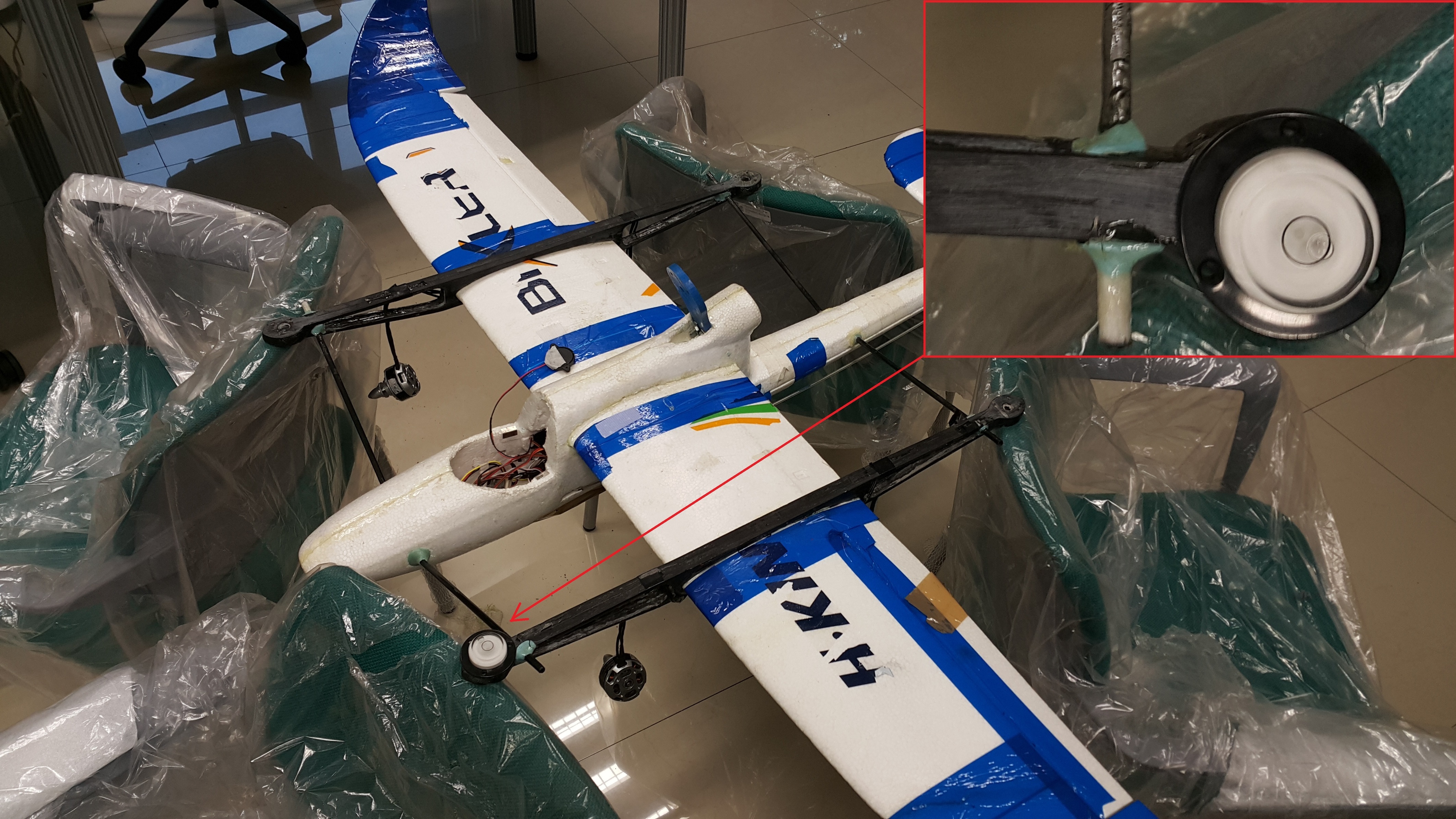
Greetings PX4 experts, my name is Jesus Lopez a current student in CINVESTAV in Mexico, I’m starting in this new world of UAV’s making a VTOL I’ve been working for a while in this fixed wind VTOL using a BIXLER 2 as the body and a structure made of glass fiber and 4 Quantum brushless motors, here is a picture of the aircraft.

I’m using a Pixhawk platform with the latest firmware and I have had some troubles with the yaw control, at first I though it could be a problem with the weight distribution or an miscalculation in the motors’ shaft direction but after measuring the weigh and direction of each motor but I continued having the same issue. After tunning the Multicopter PID Roll and Pitch work sweet as cotton and I’ve been able to make some flying test to show you the problem.

Please check the video annotations for details.
I set the 10019 DeadCat parameters because it’s the most similar to the geometry of my VTOL as you can see in this image:

In this link you can see the parameter and the log of this flying test. I tried to upload the log file on the “log uaventure” page but an error appeared for the extension file, I don’t know how to change it to the right extension but I will try to look for it on the QgroundControl.
I hope you guys could help me to find out whats the problem, thanks in advance.