Can’t get the aileron, rudder and elevator servos working. Pixhawk 4. Generic quad VTOL
All docs talk about servo function, but the latest versions of qground and mission planner all talk pwm etc.
Is there a step by step on setting up servo parameters specific to VTOL forward flight control surfaces. Wiring and Param settings. Or can someone walk me through setting up one servo and I can mirror that for the rest?
Thanks
Tim
Are you using PX4 or APM?
Hi Julian
I’m using the px4 on a Pixhawk 4 and the separate Power Management Board it come with…
Qground 3.5.2
Firmware version 1.9.0
Standard VTOL
Generic Quadplane VTOL
Three way switch 1 multirotor 2 transition forward flight
All flight modes are set as stabilize for now.
10amp BEC connected to the 8th set of pins on the AUX rail (pix attached)
Lifting motors are Main 1-4 on the Power Management Board
3 servos Aux 1-3 (havn’t installed the 2 thrust motors yet… wanted to get the control surfaces working first)
(NOTE: I have been flying this aircraft in quadX mode (just the lifting motors) and it flies great. Wings are offset 30degrees to the motors, and in 30degree pitch forward the vehicle is flying fully on the wings with minimal thrust from the lifting motors. Now want to add control surfaces and forward thrust motors for the forward flight mode.)
Custom Boxwing… Ailerons on lower front wing(outboard sections) and Elevators rear wing (center)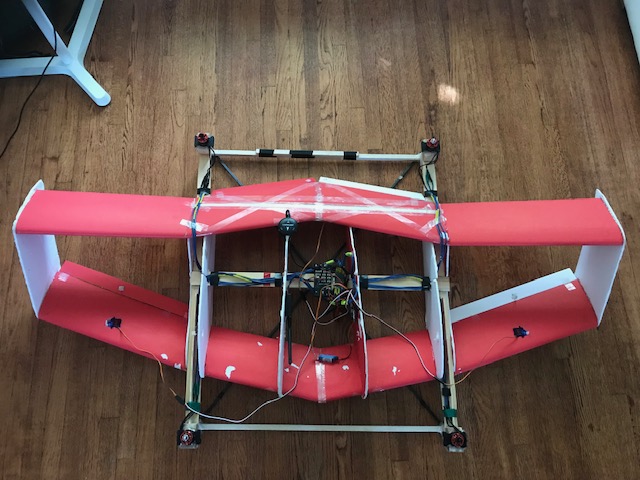
Tested: Armed - Stabilize flight mode switched to FW Flight Mode, receiver bound, no response to Tx inputs and no stabilized responses in pitch or roll. (airspeed is set to disabled… I have a digital airspeed but the Pixhawk won’t recognize it)
Some forums talk about servo parameters, some RC, some aux. If you could walk me through a line by line Parameter setup for the elevator, I could apply the same steps to the ailerons and thrust motor.
Really appreciate it!!!
Tim
Nice, looks like a fun design! Let me ping @sfuhrer, he should be able to help.
Hi Tim
Yeah cool design, reminds me a bit on the new amazon drone:)
I’ve seen that you already posted the same question in the VTOL channel:
Control surface servos won't work VTOL qaudplane
Let’s keep the conversation there to not create confusion.
Have a try with what the last answer there suggests, and post there if it helped you.
Thanks Sfuhrer and Julian,
I will keep the conversation going in the VTOL post. I did try the suggests recommended in the last post with no luck. Been banging my head on the wall for days trying to figure this one out.
Open to any suggestions
Thanks
Tim