I’m working on a tailsitter with a similar tandem wing layout as Opener’s Black Fly. I have it working with two KK2 boards linked in series, but want to put the Pixhawk 4 in it.
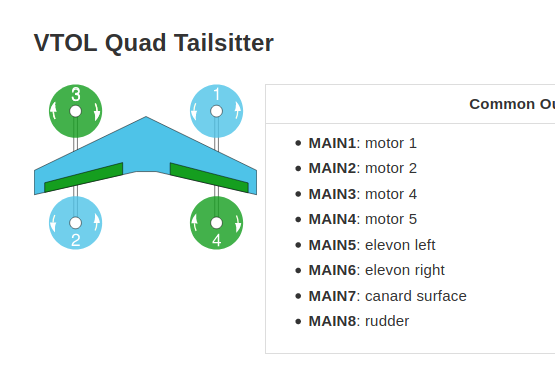
I’m using the VTOL Quad Tailsitter airframe as a starting point. I would like to use all 8 motor ports on the Power Distribution Board as actual motors… I would like to control my flight control surfaces through the remaining 8 FMU/PWM outputs.
I’m using QGround v3.5.6
I can’t get my servos to activate… they are on the first 4 sets of pins of the FMU-PWM rail (1-4)(which is powered by a BEC) and AUX 1 is mapped to Channel 1 (Ailerons/roll etc.).
Any thoughts?
Summary: want to use the Main 1-8 as motors and FMU-PWM as control surface servos. Servos not activating. DX6 TX and Serial Receiver.