Good morning,
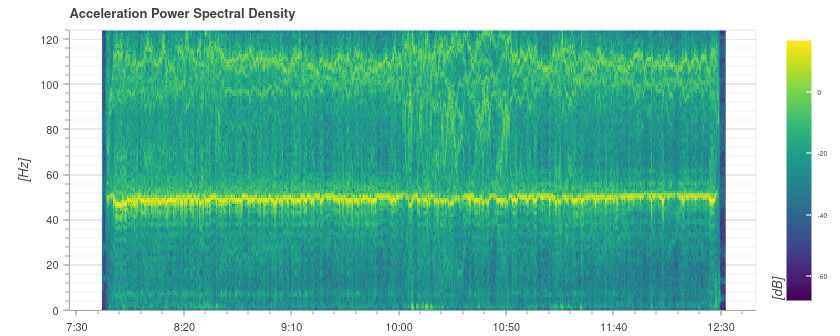
Please find the attached graph for your review. Could you kindly confirm if the trend represented by the yellow line requires any action or concern? If so, I would appreciate your advice on the best course of action.
Good morning,
Please find the attached graph for your review. Could you kindly confirm if the trend represented by the yellow line requires any action or concern? If so, I would appreciate your advice on the best course of action.
It’s hard to tell with just one plot, but it seems like this vibration at 50Hz is not directly related to the blade-pass frequency, right? (I have the impression that we see the blade-pass frequency of the rotors at >100Hz)
If this is the case, then you could place a fixed notch filter at this frequency.
Do you have a fuel engine on that drone? Maybe something else running at a constant RPM?
The drone in question is a HolyBro s500, equipped with Herelink antennas. It does not have any engines (fuel-powered or otherwise), as it is electrically powered. The observed vibration at 50Hz does not appear to correspond to the blade-pass frequency, which is typically above 100Hz for this type of drone.
You can review the detailed flight log using the link below:
https://review.px4.io/plot_app?log=d1d4330f-ca79-4497-8637-4cbb5cb254f3
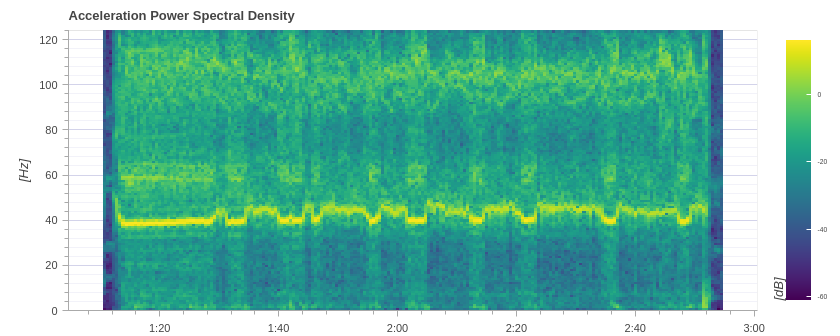
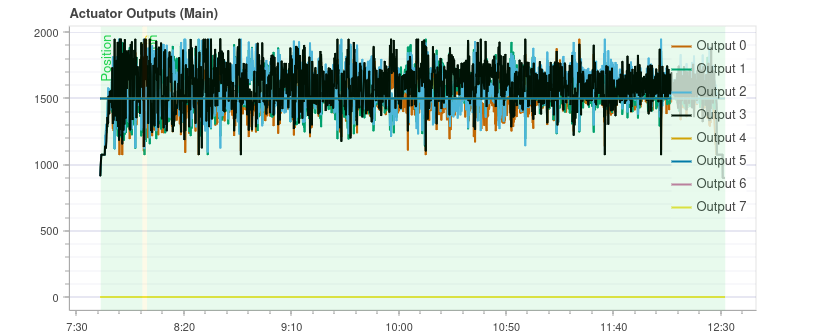
Additionally, I’ve attached some other graphs that might help identify the source of the vibration. Let me know if any specific parameters should be analyzed further.
Raw Acceleration
Actuator outputs
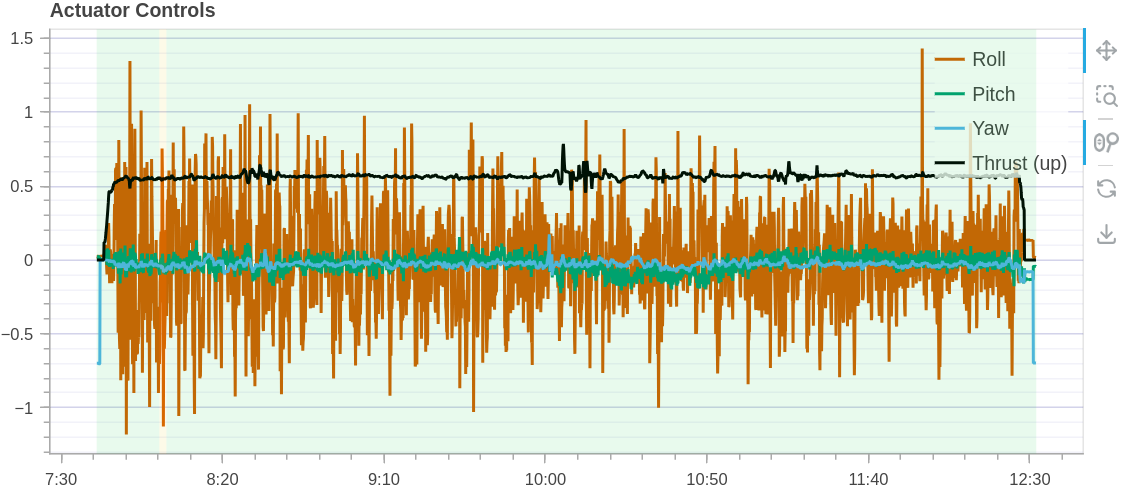
We can see here that most of the noise is fed back through the roll rate lop. You should then reduce the rollrate P or/and D gains.
Note that the new values for the gyro cutoff frequency is 40Hz, this might help as well. Also, you’re running a 5 years old firmware, it might be worth upgrading to something more recent ![]()