Hi,
I’m analyzing the flight log files from a Pixhawk 6X and I notice that the vibration metric seems high. How can I analyze when the system is experiencing vibrations? What is the scale of these vibrations?
In comparison, the logs from another drone with a Pixhawk 4 show lower vibration metrics—could it be a scaling issue? Which graph should I refer to for this comparison?
Thanks in advance for your help.
Have you seen these docs?
Hi Julian,
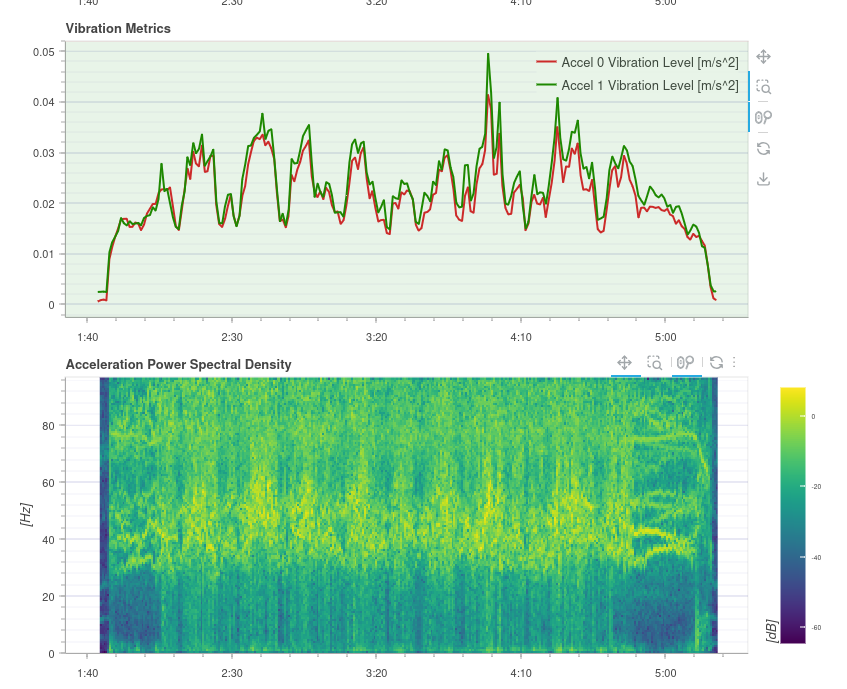
I reviewed the page, but as you can see from my two graphs, the vibration metrics are significantly different. The first graph shows a vibration level around 8, while the second one is at approximately 0.05. How can this discrepancy be explained?
From the power spectral analysis, the first graph appears to be in good condition, with a high dB level at 80 Hz, likely due to the propellers. In contrast, the second graph shows a higher dB level around 45-50 Hz, which might indicate a structural issue.
Could you help clarify why these differences in vibration metrics occur?
Thank you.
Let’s see if @bresch has some idea.
Hi, can you provide the full log?
And are you sure the drone took off/had propellers on the second graph? Usually low vibrations appear when the motors are spinning with no props
These are the full logs:
The first one is from a quadcopter with a Pixhawk V6X.
https://review.px4.io/plot_app?log=57241776-c4d1-464c-b8d9-a23bee6090e4
The second is from a hexacopter with a Pixhawk 4.
https://review.px4.io/plot_app?log=2d2fe0aa-b436-44b7-a6c5-4ede0bd1cc74
All the drones flew with propellers.
However, the vibrations in the density graphs, especially in the vibration metrics, differ greatly. It occurs to me that the V6X model might have a different vibration scale.
This is also because both drones flew well.
The question remains about the 50 Hz frequencies that is present only for the second one.
Hi,
I agree with you that V6X seems to have a scale problem in the vibration metrics graph
This is supported by the simmilar vibration seen in the raw accelerometer graph and the spectrograph → I believe both are good enough vibrations!
About the 50Hz on the second graph, I really don’t see it, but I do see that both graphs have a defined ~40Hz (first harmonic from motors) and defined 80Hz (second harmonic)
But pay attention that those are two different firmware versions!!! One drone is using dynamic notch filter and the other is not, and this changes what you see in the spectrograph, try working both in the same configuration so you can compare apples with apples
The vibration metric calculation changed at some point. It used to be unitless I think and now it’s actually m/s/s.