Hello,
I am reviewing the flight log of my OctaQuad, which is based on the Pixhawk 6X running PX4, and I’ve noticed significant disturbances in the “Actuator Control FFT” and “Angular Velocity FFT” when viewing the log via the Flight Review tool (according to FlightLog analysis instructions).
I would like to understand whether these disturbances could be related to flight stability or if they impact the overall flight performance. If so, what could be the possible causes of these issues, and what would be the recommended solutions? Additionally, I would like to know the ideal values or trends for these graphs.
System Details:
- Quadcopter Type: OctaQuad (Coaxial Octocopter)
- Flight Controller: Pixhawk 6X
- PX4 Version: 1.15.4
- GPS: Yes
- Airframe: Generic 10" Octocopter Coaxial Geometry
- Body Structure: Multilayered Carbon Fiber with Removable Arms
- Dimensions:
- Length (Nose to Tail): 230 cm
- Width (Right Motor to Left Motor): 352 cm
- Weight: ~170 Kg
I am also seeking clarification on the technical aspects of the “Actuator Control FFT” and “Angular Velocity FFT” in the PX4 flight logs. I don’t fully understand these parameters, including what values are considered normal or problematic. Any insights on what constitutes good or bad values for these graphs would be highly appreciated.
I would like to:
- Understand whether these disturbances impact flight stability.
- Identify potential root causes and solutions.
- Clarify the ideal baseline values/patterns for these FFT graphs.
Logs:
1- https://review.px4.io/plot_app?log=2fa38ee0-4845-4a11-965f-3a014022ad19
2- https://review.px4.io/plot_app?log=90bd1fb9-a4fd-4169-b41c-02590cc2d934
3- https://review.px4.io/plot_app?log=cd51047f-156e-4e6c-97b0-f1d2a295d466
4- https://review.px4.io/plot_app?log=7720c243-6e77-4f7f-8e82-070be4cb6203
Thank you for your support!
@dakejahl
I need some help here.
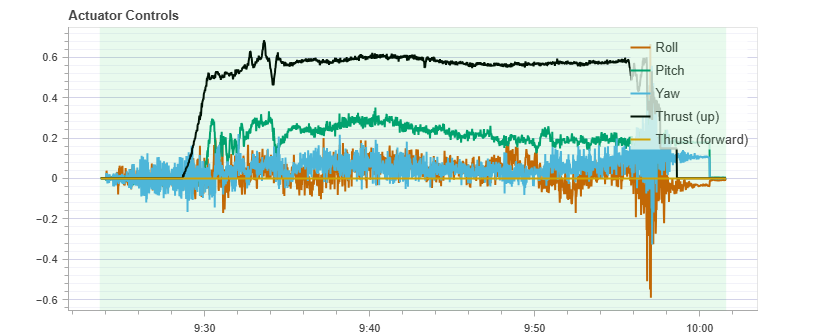
There is quite a lot of vibration on the Z axis specifically.
How do you have your flight controller mounted? Are you using dampers?
No dampers.
Pixhawk is directly connected with the plain surface of the body.
I really appreciate your prompt response.
Hmm looking at flight log 3 it actually looks like the vehicle is poorly tuned. Seems that your gains are extremely high given the size of this aircraft. Did you tune the vehicle? Can you outline the process you followed?
No, its not tightly tuned because the vehicle started flipping.
And in one of my other logs @bresch guided me to fix the yaw effectiveness first, and now I am working on that.
It’s not tuned yet, fixing the yaw effectiveness to start tuning so it doesn’t flip while working on tuning.
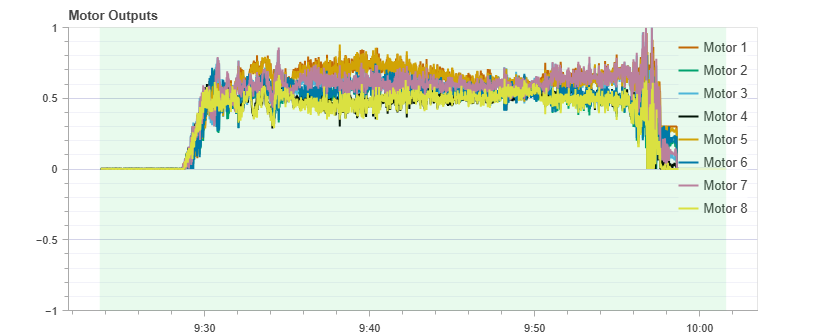
I’m still experiencing the positive/negative yaw in the actuator control and motor output also shows imbalance propeller behavior.
Have you built and tuned a small/medium octoquad before building this large airframe? Tuning can be quite challenging if you haven’t done it before, there are things you only learn through trial and error. I think you would benefit by building an intuition for tuning a PX4 octoquad by first practicing on something small and less risky.
Yes. I do have experience of tuning with small/medium Octaquad.
I shared some details in my other post.
Do you mean the vibrations (FFT) issue is due to the vehicle not being tuned yet and after tuning this issue will be fixed?
Or the vibrations can be sorted out after the tuning?
This is not a tuning issue but a hardware problem and can be addressed by tilting the rotors (by 2-3 degrees) to increase the yaw effectiveness of the drone.
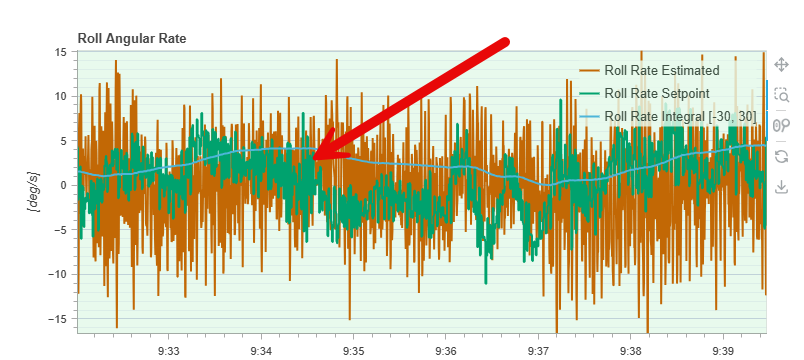
Did you tilt your motors? I agree with bresch assessment about yaw effectiveness, however I also think your rate controller gains are too high given the size of the airframe. Take a look at the Pitch Rate and Roll Rate plots (zoom in) and you will see the response is way too strong.
Do you mean the vibrations (FFT) issue is due to the vehicle not being tuned yet and after tuning this issue will be fixed?
Or the vibrations can be sorted out after the tuning?
It’s a chicken and egg problem – poor tuning can lead to excessive vibration and excessive vibration will make it harder to tune. Your vibration metrics don’t look that bad but your FFTs and outputs look horrible, so it makes me think the problem is with the tuning.
Yes, I added the tilt to motors and here is the log after adding the tilt.
But, still the FFT isn’t as good as it should be.
Are the higher number of oscilations in the Roll/Pitch Angular Rate shows the high gains?
And, can you please explain the “Actuator Control FFT” and “Angular Velocity FFT”, what it does and what it shows?
And, can you please explain the “Actuator Control FFT” and “Angular Velocity FFT”, what it does and what it shows?
It shows you the frequency components of your angular velocity and actuator controls. You would look at the FFT to identify frequency bands to apply your notch filters. For blade pass frequency or frame resonances. I am not the best person to ask about this though, I have less practical experience than others.
I think I see now exactly the issue with yaw. Notice that 4 of your outputs are pinned to their near maximum values in an attempt to produce yaw torque. This is ineffective as you can see the heading changes very very slowly.
Multirotors produce yaw torque by using the angular momentum of their propellers. This is achieved by increasing the RPM of CW propellers and decreasing the RPM CCW propellers (for positive yaw). You are likely facing problems with the design of the vehicle due to the large mass moment of inertia of your airframe. Since your hover thrust is at 60% you already do not have much headroom for generating yaw torque. The propellers with increased RPM are hitting their maximum values and the propellers with decreased RPM are hitting the bottom limit of RPM before hover thrust is lost.
I really appreciate your efforts, and I believe we are now aligned. However, I think the problem may stem from the design.
Could we involve someone with more experience to guide me in the right direction? This will help me address the issues effectively and get everything working.
@rroche @bresch Could one of you please confirm the theory presented by @dakejahl and send us in the right direction? Thank you
Hi @rroche ,
Can you please get me some help here, I’m stuck with my project and getting crashes.
I really appreciate your help.
I need to know what’s the core reason for the instability of my drone?
Here are my latest flight logs:
Flight # 1:
Flight # 2:
https://review.px4.io/plot_app?log=75922448-3276-4aae-898b-26c6e7b837e3
Flight # 3:
https://review.px4.io/plot_app?log=8b08c262-2090-4d75-90a7-3ce105e2927a
In all the flights I’m getting the problem on Roll, it’s oscillating after a few seconds (8-12) of take off.
Propulsion System:
Motor: KV65, 24S, 100V
Propeller: 42" 16.5
ESC: Thunder 24S 200A ESC for High Power UAVs / Drones
Body/Frame: Multi layered Carbon Fiber with Honeycomb structure.
A few parameters:
MC_AT_EN = 0
MC_AIRMODE = 0
THR_MDL_FAC = 0.3
MC_ROLL_P = 2
MC_PITCH_P = 2
MC_YAW_P = 1.7
MPC_THR_CURVE = 0
Below given are a few old logs of same drone with some longer flights. The drone wasn’t 100% stable, but it was hovering for more than a minute and landing was also fine (no crash).
Flight Log 4:
https://review.px4.io/plot_app?log=1055b064-d9e3-46df-b888-3dd9b0d8c0b8
Flight Log 5:
https://review.px4.io/plot_app?log=2fa38ee0-4845-4a11-965f-3a014022ad19
Have you tried to adjust these params to address the roll oscillation:
- MC_ROLLRATE_D
- MC_ROLLRATE_P
According to Multicopter PID Tuning Guide (Manual/Basic) | PX4 Guide (main)
Yes, I tried all the PID parameters, but none of these are working.
Increased/Decreased the gains.
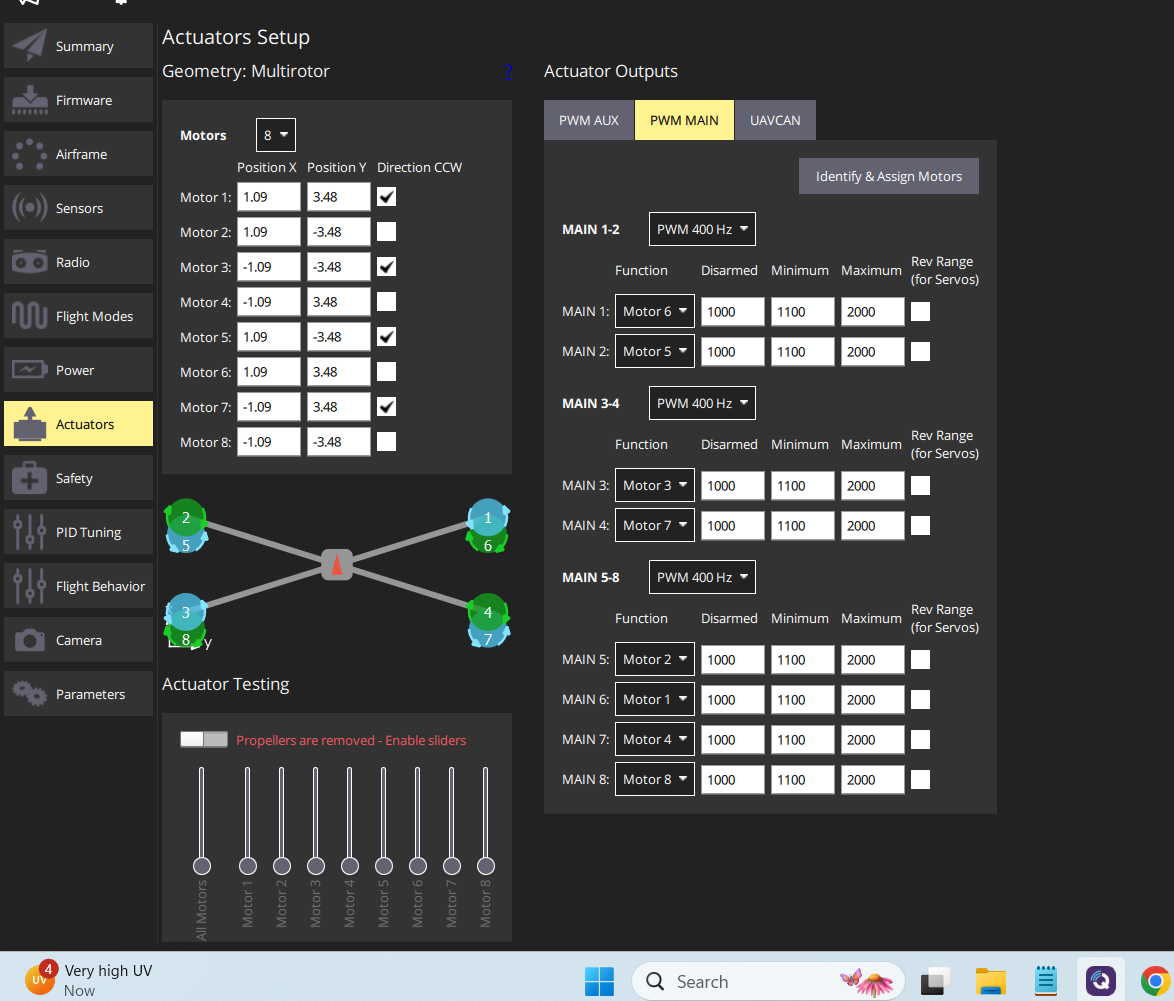
Stupid question: and all motors are connected with PWM 400 Hz or DShot?
The motors are connected with PWM. The ESC’s I’m using doesn’t support Dshot.
ESC’s: https://store.tmotor.com/product/thunder-200a-esc.html
Ok, and set to 400 Hz, not 50 Hz? That’s in the actuator tab in QGC.
I’m already using PWM 400 Hz.
Ok, 400 Hz is right, good you checked that.
Now what you haven’t mentioned but what I can see from your airframe that this is a very wide octo configuration with long arms, so that’s potentially going to be a challenge to tune well, especially if it has some flexibility in these arms.
You will have to reduce the high pass filter frequency and try to avoid the oscillations, or maybe look into the mechanical properties and figure out the frequency modes of your airframe.