So I’ve been getting some terrible noise in yaw(around 24Hz), and I can’t seem to figure out the issue. The confusing part is that, with yaw noise this bad, I would hardly expect to able to fly at all. However, it does seems to fly somewhat okay, though, and you don’t visually see it behaving extremely erratically.
The platform is a custom build with 15" props, using a Pixhawk 4 mounted with four foam pads. I’ve tried running it on the bench without props thinking that they may be ridiculously out of balance, but I still seem to get massive amounts of noise. I’ve tried covering the ESCs and PDB with aluminum foil in case it was some EMI issue. Finally, I tried switching the flight controller because I was thinking it could simpy be a bad IMU, but no dice. In addition, I seem to get frequent errors with inconsistent compass orientations (w/ external GPS) and occasionally with accelerometer bias. Could it simply be that my frame simple has this vibrational mode at this frequency? I’ve made more than one of this frame, and I’ve seen this vibration before, but the other quads no longer seem to have this issue.
Below are some of the logs I’ve recorded. The flights are basically at hover:
Hi,
You can try one thing is setting up a notch filter at 25hz which seems to be the blade pass frequency of your props. Most likely that is the cause for the noise and may lead to some abnormal behaviour in future. Better to filter that spike and test to see if there is still noise in the signals.
So I decreased the yaw rate K gain (1.0->0.5), and it seems to have mostly eliminated that 24Hz peak in the controller, although there does still seem to some gyro noise in the angular acceration FFT graph.
I can try to play around more with the K and/or I gains, but the yaw tracking really seems to be quite bad, and I’m still concerned that the vibrations according to the vibration plot are quite bad, although maybe some prop balancing would help with that?
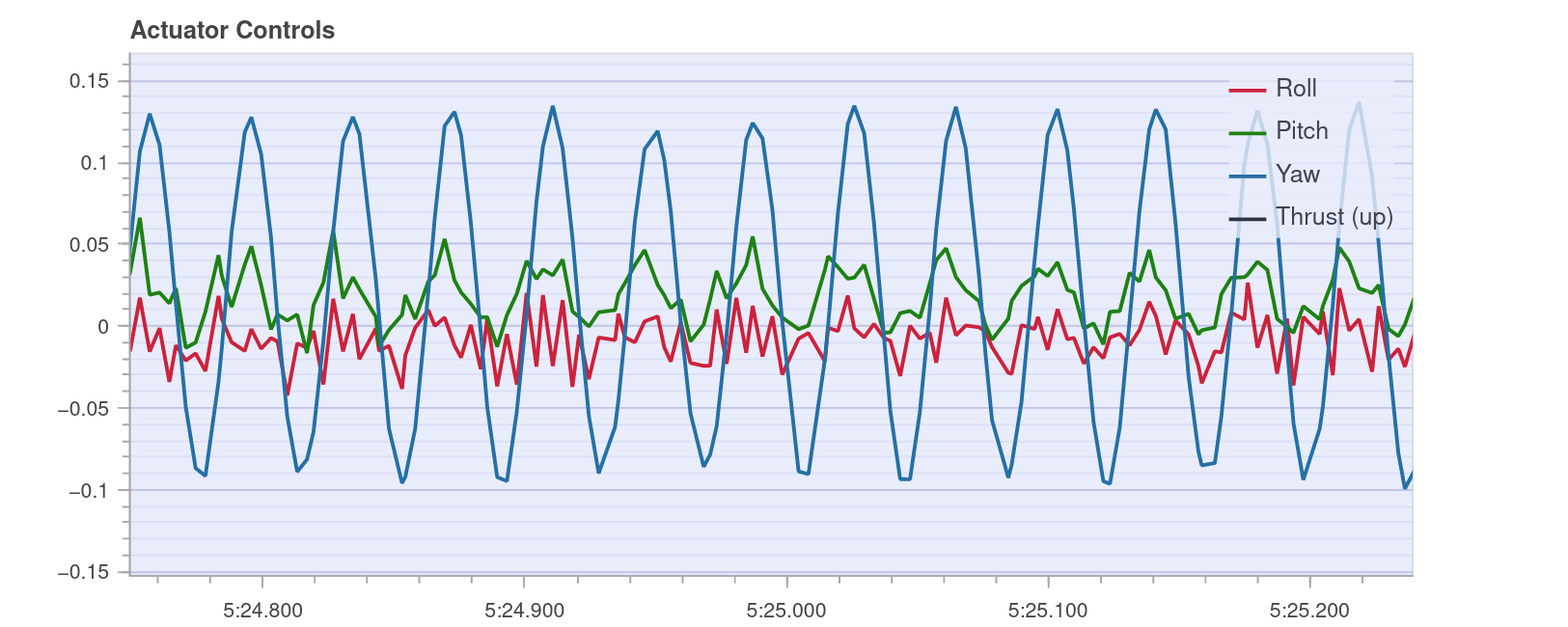
The Actuator Controls FFT chart looks great, and both the Angular Acceleration FFT and Raw Acceleration charts look very good compared to the previous (decreased yaw rate gain) log here:
My only concern is that the “Vibration” still shows that it’s in the red. I’m not sure there’s much else I can try, and I’m thinking it might just be some tolerance issues with the frame, as I have a duplicate frame with excellent(green) vibration.
Thanks for all the help!
I just looked at the log again, and it appears that the “red” and “green” has been rescaled so that the vibration is all in the “green”. I was beginning to have a feeling that there was something wrong in how the vibration numbers were either calculated or interpreted by the tool due to firmware versions, and it appears that this may have been the case?