Hi,
I am trying to use H-RTK Unicore UM982 (Dual Antenna) GPS Antenna to fix the yaw issues I were having due to the higher values of EMF.
Here are the details of my setup:
Firmware: PX4 1.14.0rc
AutoPilot: Holybro Pixhawk 6C
Airframe: Quadrotor x (Generic Quadcopter)
Issues:
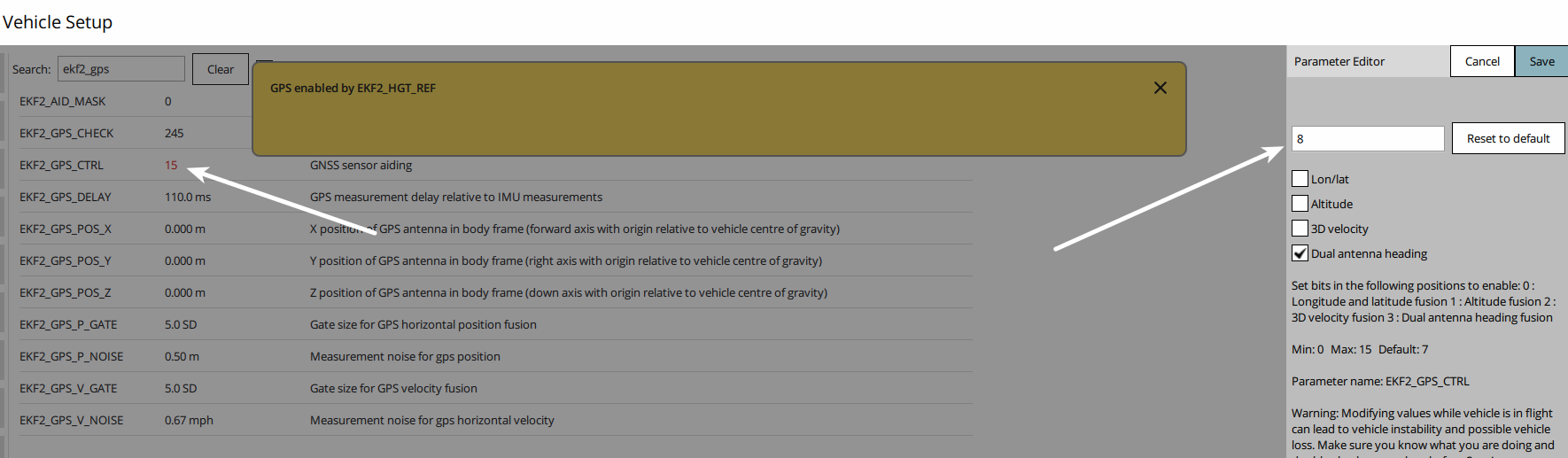
- Unable to set the value of “EKF2_GPS_CTRL” to “Dual Antenna Heading” (8).
- Unable to arm the drone while in “Position” mode, upon pressing the “arm” button from remote, the GPS red light becomes flashing red in fast and a beep came. No error on QGC screen. Drone is arming if I arm it in the “Altitude” flight mode.
I can successfully set the value of the below parameter as asked in the documentation, but getting a message while trying to set the value of “EKF2_GPS_CTRL”.
- SER_GPS1_BAUD → 230400
- GPS_1_PROTOCOL → 6: NMEA
- GPS_YAW_OFFSET → 90
Whenever, I try to set the value of “EKF2_GPS_CTRL” to “8” (Dual Antenna Heading), the value automatically goes back to “15”.