I am using a PX4 flight controller with the ekf2_mag_type parameter set to none, and I’m controlling the drone with a Futaba remote controller. In this configuration, the drone flies well.
However, when I connect to QGroundControl (QGC), I encounter an issue where I cannot arm the drone. The error message displayed is “MAV_CMD_COMPONENT_ARM_DISARM.”
Could anyone provide guidance on how to configure EKF2_MAG_TYPE=none while using QGroundControl? Any suggestions or workarounds to resolve the arming issue would be highly appreciated.
That cannot be debugged without more information. Messages (common) · MAVLink Developer Guide is a mavlink command sent by QGC to do the arming - it’s not an error in itself.
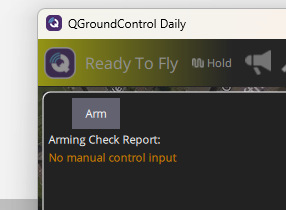
What you need to do is use the latest QGC daily version and click on the status area. That will show you an arming report indicating what is stopping takeoff.
That said it is most likely that you are trying to arm in a mode that requires a heading.
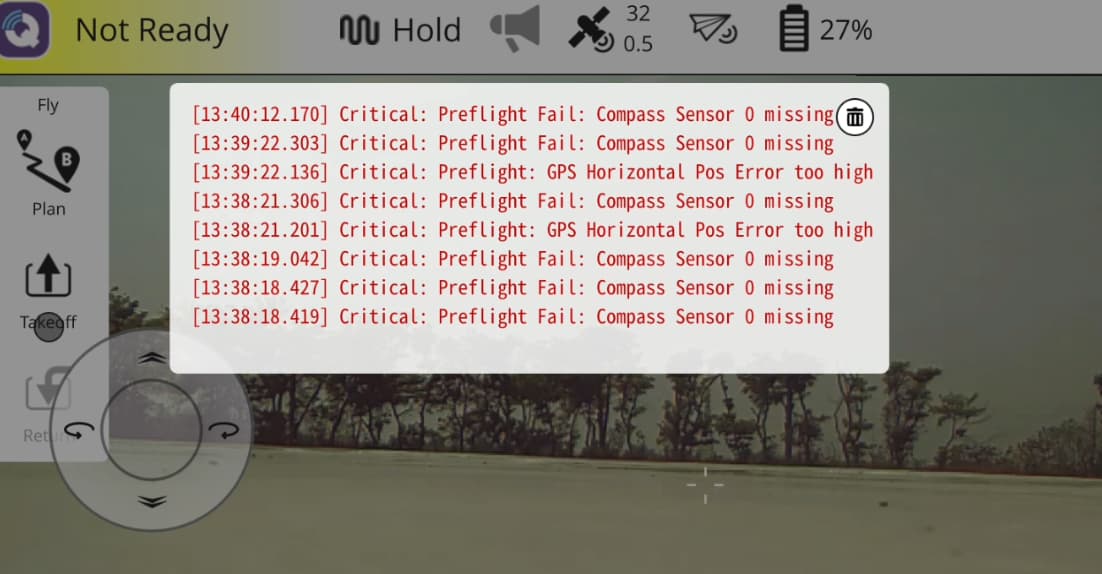
I am experiencing an issue with arming my drone in different modes (Stabilized, Hold, and Manual) when the ekf2_mag_type is set to none . The preflight error message I receive is “Preflight Fail: Compass Sensor 0 missing.”
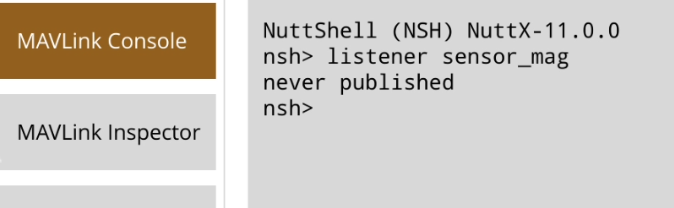
Additionally, when I checked the sensor_mag topic using the MAVLink console in QGroundControl with the command listener sensor_mag , the output was “never published.”
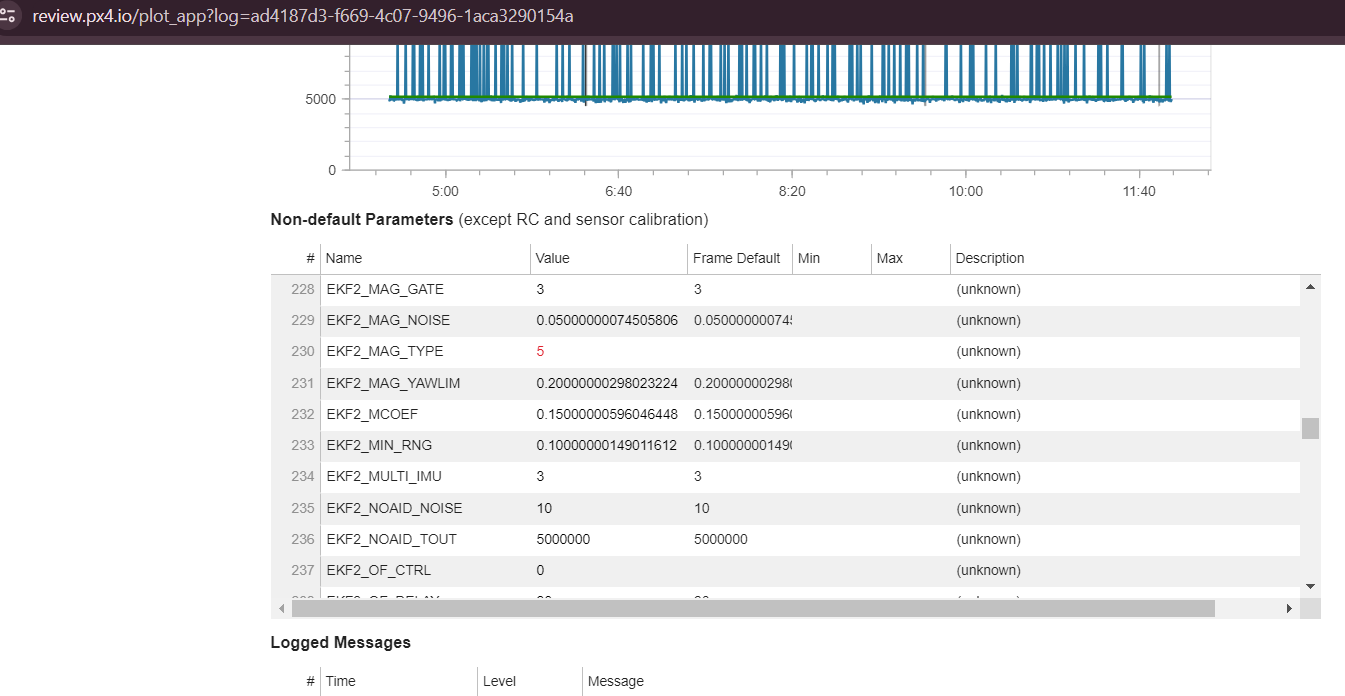
Looks like something is wrong with the mag. In the log you shared there is mag data, whereas the failing preflight check and listener sensor_mag indicate there is no mag. I would start with looking into that, might be a hardware or connection problem.
Or you can also explicitly disable some mags with CAL_MAGx_PRIO.