i have a issue lifting off my drone using the CUBE Orange - Herelink setup. I am on PX4 v1.13.3 … I have calibrated esc, check the props and even reduced the land detector_max vel values. Seeno some prop rpm increase but still the drone doesn’t lift. had flown well using PX4 v1.12.2
Any suggestions !! thank you
What sort of ESCs? And do you have a logfile and maybe image of your setup?
hi…the link to my log file…
https://review.px4.io/plot_app?log=73874be0-bac9-48f6-8ed5-f54a4fc7f3cd
My esc are sunnysky and props EOLO
It was working well on px4 v1.12.x. I went thro a minor crash .
previously running well . video link below

thank you
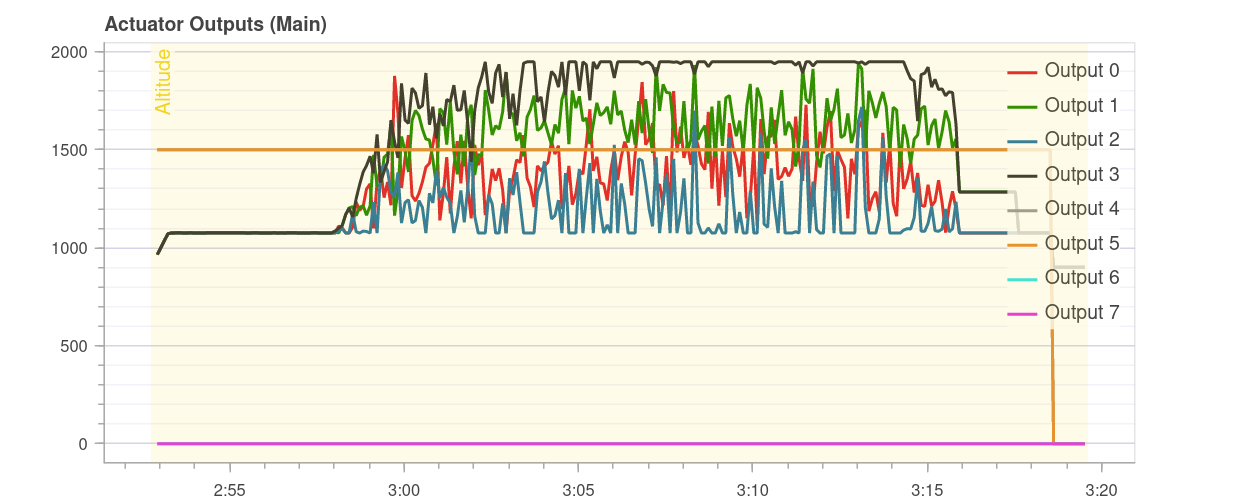
I’m looking at this and I see that one motor is at the maximum, two are around half way, and one is very low. Is that what you’re observing visually? If they all seem to spin about the same, I would point to a ESC calibration issue. However, if they are spinning at different speeds like the log shows, then something is not in balance, either pitch and roll, or yaw. Could it be that the motors are slightly tilted and so yaw control is poor? In other words, you can tilt motors slightly in order to enhance yaw control, or tilt them the wrong way and decrease it.
Check out Info about Angled Motor Mounts for Multicopters - Oscar Liang if you don’t know what I mean.
1 Like
Edited 5 - This issue has been merged with the below link
Hi…thanks again for the feedback…I checked the motors individually using the motor slider QGC menu and all have enough power to single handedly tilt the 2.5 KG weight drone to one side !!! ( In fact during my last trial , one of them ripped opened the stator cover of the ESC motor while hitting the ground during the slider test ![]() ) So I am assuming there was enough power from these motors. ESC calibration was done many times directly thro USB -PC interface with QGC ( on pc side) …
) So I am assuming there was enough power from these motors. ESC calibration was done many times directly thro USB -PC interface with QGC ( on pc side) …
What does this parameter " gnd-speed_thr_sc " do as far as lift goes . i see that increasing the value , increases the throttle during lift…