Hello everyone.
I have same issue with my DIY drone. When I armed, there is no problem, all motors spin with my PWM_MIN value (1100). But if I give max throttle; 2 motors are spinning slowly and stopping, 2 motors are spin higher. What should I do? Is setting higher the PWM_MIN value right solution for that issue?
Thanks!
Here is the difference:
Screenshot from 2021-03-26 23-54-14|690x387
Hi @Abdulsamet_TUTUNCU ,
The problem could have different causes.
-
The ESCs are correctly configured and calibrated on QGround and also in their internal parameters?
-
Could be that your drone is just trying to correct it’s position (roll right in the image you attached). What fly mode are you using?
-
Are all the sensor correctly calibrated? Have you got a good GPS signal? (in case of Position mode)
-
A motor never sould stop once is armed, so could be that PWM_MIN value need to be at 1150 or somethink like that.
-
Can you share any flight log?
See you
Hi @Retro-meb, thank you for answering 
- I am sure that ESCs are correctly calibrated.
- I think main problem is that. You can see my ulg file ( https://drive.google.com/file/d/1z2tq9uKMXfgN2VqzjLdvdQTuQvynLKB7/view?usp=sharing ) . I am using stabilize mode for fix the problem. I have no props on my air. I just wanted to see servo outputs without props.
- There is no difference between arm with GPS and without GPS, servo outputs same. I really calibrated sensors carefully but there is nothing change.
- PWM_MIN value still 1200.
By the way I have pixhawk cube orange.
What should I do? I really need help.
New edit:
I upload ardupilot firmware and use internal and external compass on Here3. I did compass and accel calibrations carrefully. After that PWM outputs become nearly same.(±50) But I insttalled PX4 firmware again and did all calibrations but motors spin still inconsistent. I really need help about PX4  .
.
Hi @Abdulsamet_TUTUNCU ,
I use Cube Orange 1.11.3 to, but I’m not using HERE 3 untill new developments with the UAVCAN v1 come out…because I’m not sure about the reliability now…
According to your parameters, you are using like primary magnetometer CAL_MAG_PRIME 589858. Is the one of the HERE 3?
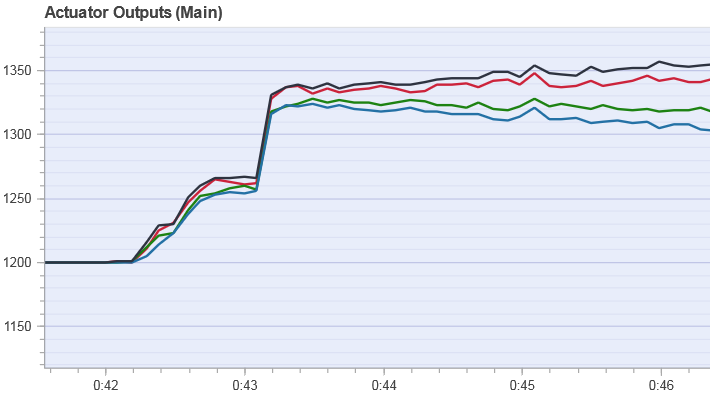
At the “Actuator Outputs” chart I can’t see any motor stop and the motor lines aren’t very distant between them.
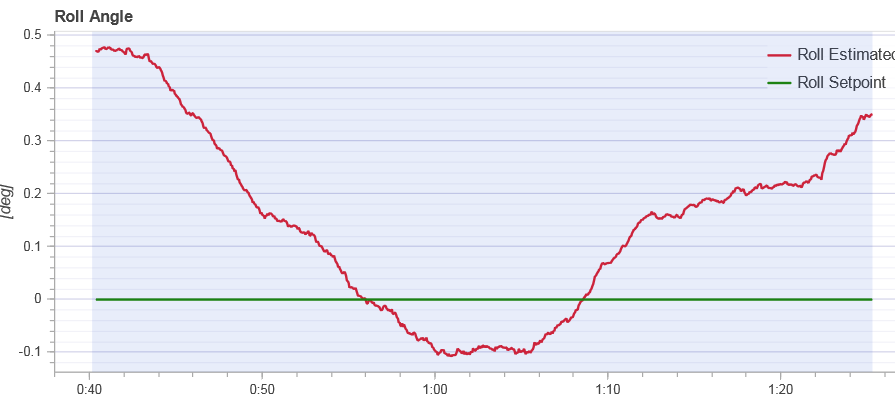
It’s true that the output PWM is not exactly equal, but in my opinion, it is because from the very beginning the auto-pilot feels that the roll and pitch angle is not 0 and is trying to correct it.
And as the time passes and it can correct the pitch and roll, it tries to correct it more abruptly.
I don’t know the worth of the drone…and I don’t wan’t any revenge  …but I will suggest you to make a brief fly.
…but I will suggest you to make a brief fly.
See you.


 So I can not fly without sure.
So I can not fly without sure. 

{kind=link}