Hi, I’m the beginner in the PX4.
I use QGC Daily Version master:d31b58f3f 2022-04-22 06:01:09 +0000 to flash firmware PX4 Pro Stable v1.12.3 to my Cube Orange.
I use my custom structure frame, 6xTmotor MN601-S KV170 with FOC ESC Alpha 60A HV 12S, Cube Orange with Here3, Skydroid H12 and 2x6S Battery 16000mAh.
I set the position of sensors like this >
EKF2_GPS_POS_Y = -0.205 m (205 mm from CG)
EKF2_GPS_POS_Z = -0.190 m (190 mm from CG)
EKF2_IMU_POS_Z = -0.15 m (150 mm from CG)
Calibrate all sensors and radio.
SYS_AUTOSTART = 6001 (hexarotor x)
PWM_MAIN_MIN = 1075 us
Motors test and motor ordering is normal.
I confuse the PWM_MAIN_OUT of this airframe default setting because it’s 12345678 but I think it should be 123456.
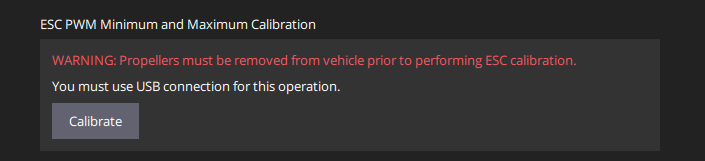
I don’t sure about the calibration ESCs, because the provider said “FOC ESCs no need to calibrate”.
Could you confirm the FOC ESCs need to calibration?
I use T-motor MN601-S 170KV and ALPHA 60A HV 12S built-in the base of motors.
Should to test PWM_MAIN_MIN more than 1075 us, right?
and PWM_MAIN_OUT is 12345678 is correct? it looks weird.
Can’t confirm that, I don’t use the same ESCs.
I know I calibrated different ESCs according to manufacturers notes, and then calibrated them again in QGroundControl.
I can’t tell what you should look for multicopter frame, but for VTOL the parameter is VT_IDLE_PWM_MC; so what PWM it should output after arming and while it’s horizontal.
Can’t fix it. I set PWM_MAIN_MIN to 1100 or calibrated the ESCs(with Power setting in QGC) but the result as the same as some motors stop in the Manual/Stabilize mode.
In Altitude or Position mode if I armed and release the throttle to the center the motors don’t start spinning then disarmed by the systems.
= Armed → Thrt50% → All motors do not spin
But if after arming(Altitude or Position Mode) and push up the throttle about 60-70% the motors starting to spin, then I must to lower the throttle to 20-30% to let it stay on the ground. Then some motors stop spinning after 20-30% about 10 seconds but if I quickly to takeoff it after 20-30% the hexarotor can fly normally.