after updating my Pixhawk 4 software from v1.12.3 to v1.13.0 i got a weird behavior. The Drone keeps going down without moving the throttle stick down. Also, The motors sound like they do not get constant power although i do not change the throttle stick “as you can hear in the attached video”.
Hi
Are you using CUBE FC ( orange). I think there is a cable loose inside the FMU unit or you are flying in a highly metal / magnetic interference area …Also 50 seconds log duration is not enough to see things clearly through the graph…!
The pitch / estimate graph speaks that a PID tuning is required !
The Actuator outputs (EXTRA) indicate there is reasonable equal thrust from your motors.
There is very high vibration from your frame. Must check whether any arm is loose or rotating slightly by itself
You have flown in Stabilized mode. Why don’t you try and fly in position mode and post your logs again…
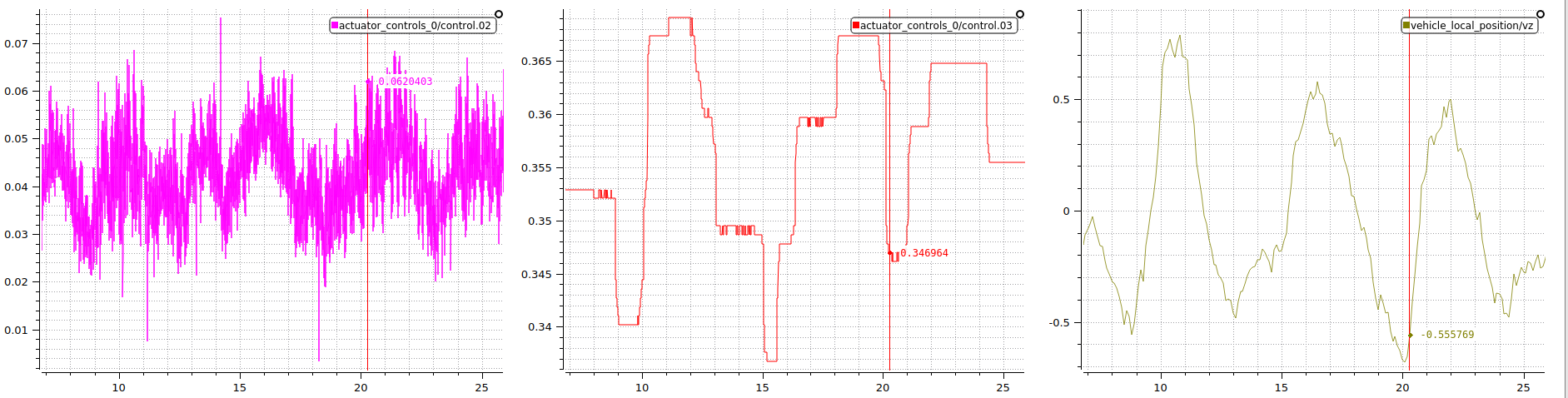
I don’t see anything crazy off in the log. It looks to me as if the throttle to vertical acceleration is very sensible, and that maybe also yawing actuation has a larger effect on vertical acceleration than normal.
If it’s too hard to keep the drone level in Stabilized mode then try in Altitude mode once, and report if it looks/feels weird there too.
" It’s probably the derivative term of the rate controller. One thing that changed is the filter on the gyro derivative. It was a 2nd order lpf in 1.12 and we now have a 1st order lpf for stability reasons. You could then reduce the IMU_DGYRO_CUTOFF to have the same attenuation at high frequencies.
You should be able to go as low as 10Hz without introducing lag issues".