Hi all,
I need a log file reader expert plz🙏🏻
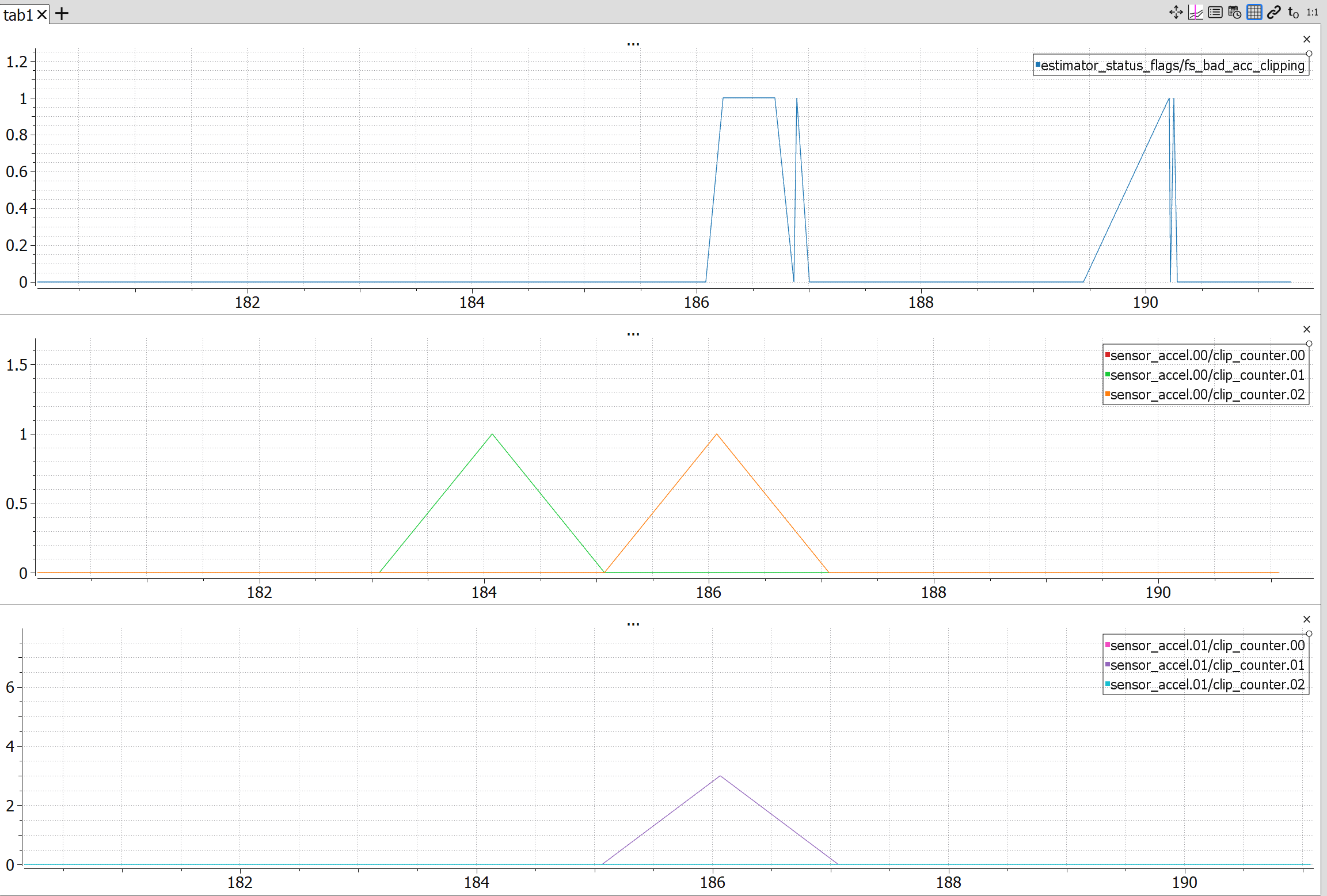
I had a flight with mini quadcopter drone using MRO pixracer FC and PX4 1.13.3 release I flew in stabilized flight mode first and all was ok then I tried position flight mode the drone hovered ok then I increase throttle little and drone went fast up like it’s stuck in a high throttle or something so I applied kill switch mid air and then I deactivated it to fly again and it did the same way and then made a kill switch mode again and drone crashed. My question what caused that acceleration instability & failure and unstable throttle acceleration in position mode? I saw warnings about ACCEL 0 clipping! Please find log below
https://logs.px4.io/plot_app?log=baaa6e1f-5303-43ea-ab50-b48a46a834d1