Hi,
I am using a Pixhawk-4 flight controller running PX4 FW 1.10.1 on an quad-copter drone custom-built. I done multiple hover test on the same plate form , however yesterday on 8th August 2020 when i takeoff the drone for hovering, it takeoff very well and it hover for 18:50min (drone flight time is 40min)
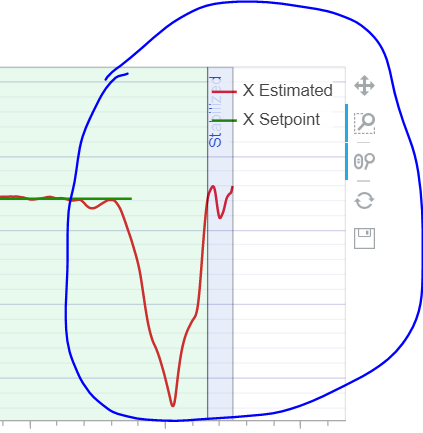
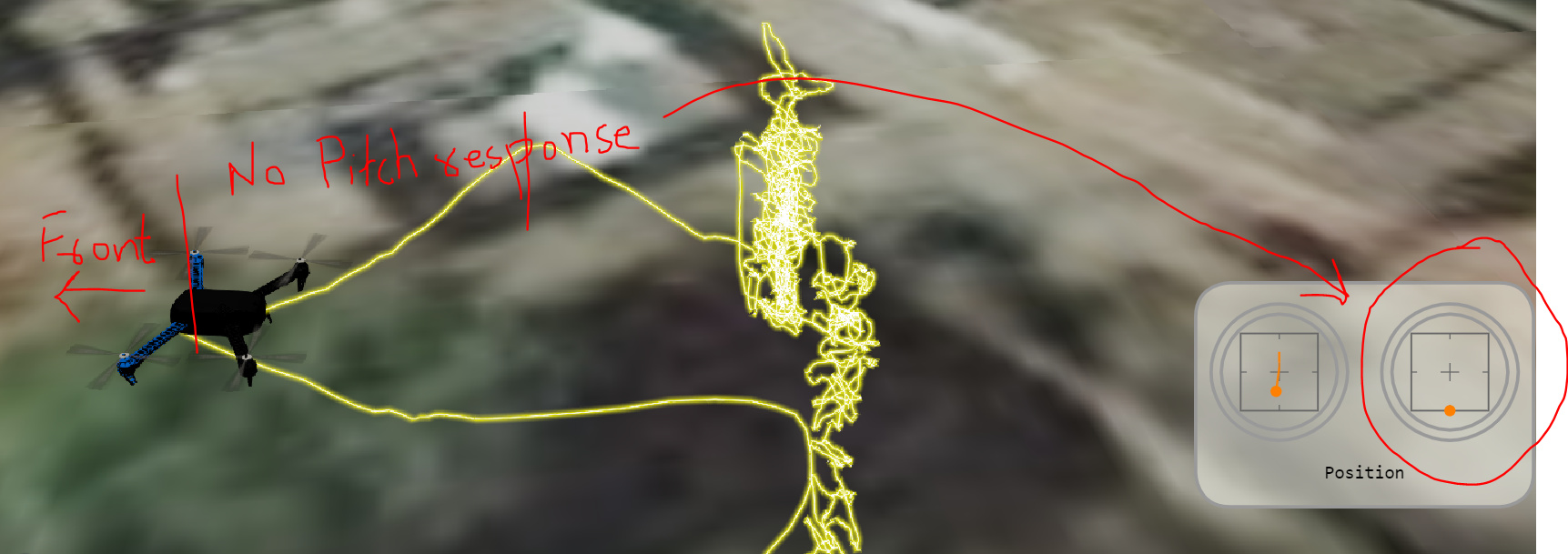
- suddenly after at 18:52 it start drifting in " Position mode " (with satellite count 20) , without RC input as shown in the below picture of 3D Flight review.

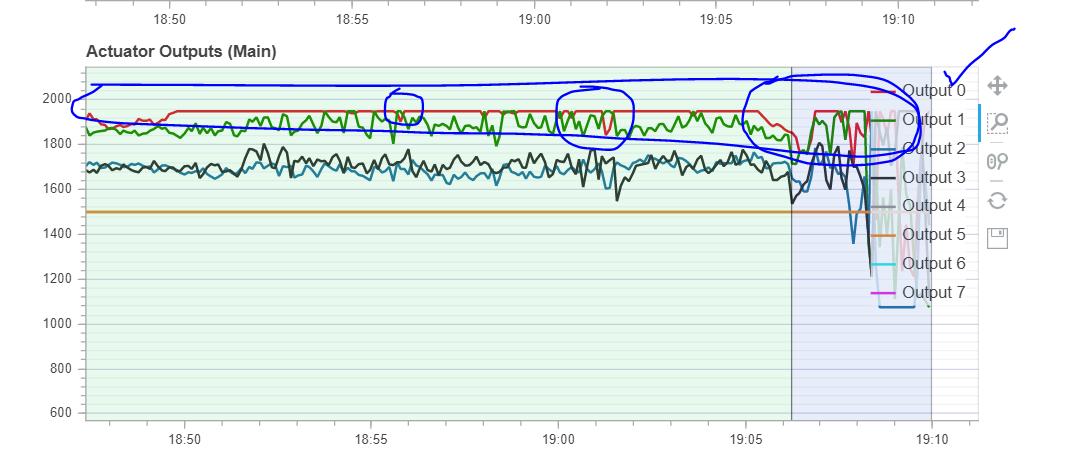
- When i notice the drift i take the RC and trying to save the drone from trees , but the response of the RC input was lagging and the drone was out of control ( as shown in the below snap of 3D Flight Review) ,so i switch to " Stabilized mode " and trying to land safely but the drone hit a tree and fall down.
I review the log but found nothing , kindly help me to found out the Reasons of the above issues of crash.
Log Flight Review: https://logs.px4.io/plot_app?log=0f91d62f-4871-4d83-8cd7-1b17836d93c3
3D View Flight Review : https://logs.px4.io/3d?log=0f91d62f-4871-4d83-8cd7-1b17836d93c3
PID Flight Review : https://logs.px4.io/plot_app?plots=pid_analysis&log=0f91d62f-4871-4d83-8cd7-1b17836d93c3
Kindly note that problem happened after 18:50min of flight.