There was a bit of head-scratching to get both the controller orientation, and RC inputs working as they should. There’s no option to set orientation as Roll 180 and Pitch 90, meaning these values had to be offset manually, which breaks the accelerometer calibration and flight levelling routines in qGroundControl 3.0.
Through tethered testing, I then found I needed to reverse channels 1 and 2 on my radio to get the correct outputs. There’s potential for this to be automated during the radio calibration, but I’m still in the process of digesting how all the code works.
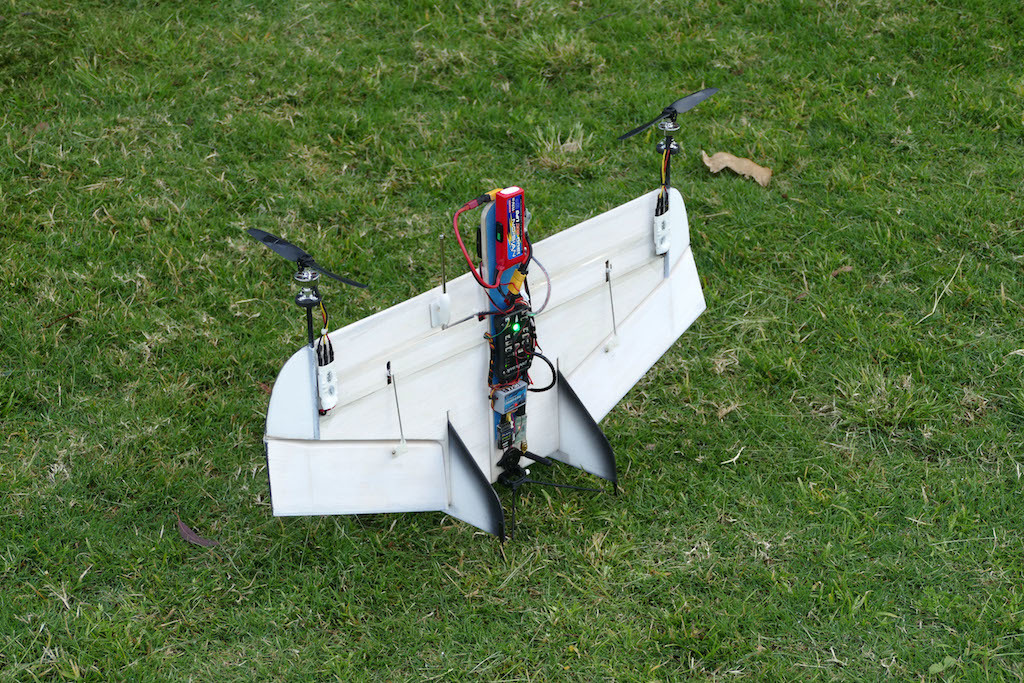
Waiting for better weather to carry out test flights, but I’ve attached photos of the prototype below. Construction is out of depron foam, 3mm & 6mm carbon fibre tubes, and balsa. It took around 4 hours to assemble, but could be built a bit quicker now that I know how everything should work together. It uses extremely cheap Turnigy park flyer motors with 8x4 props, 20A ESCs with SimonK that I had left over from a previous project, 1,300mAh 3S Lipo, an old analog airspeed sensor, and a 3DR Pixhawk that will be swapped for a PixRacer once my order arrives. All up weight is 550g, with around 800g of static thrust.