Hidden in the following PR ![]()
Testers welcome: for the Convergence and for fixed-wing Acro in general!
- ada
Hidden in the following PR ![]()
Testers welcome: for the Convergence and for fixed-wing Acro in general!
Are you using the eFlight Flight Controller?
Awesome! I might get back into flying fixed wing with that!
@PKocmoud: we put a Pixfalcon in it: http://px4.io/portfolio/e-flite-convergence/
@LorenzMeier: looks like you have some time now 
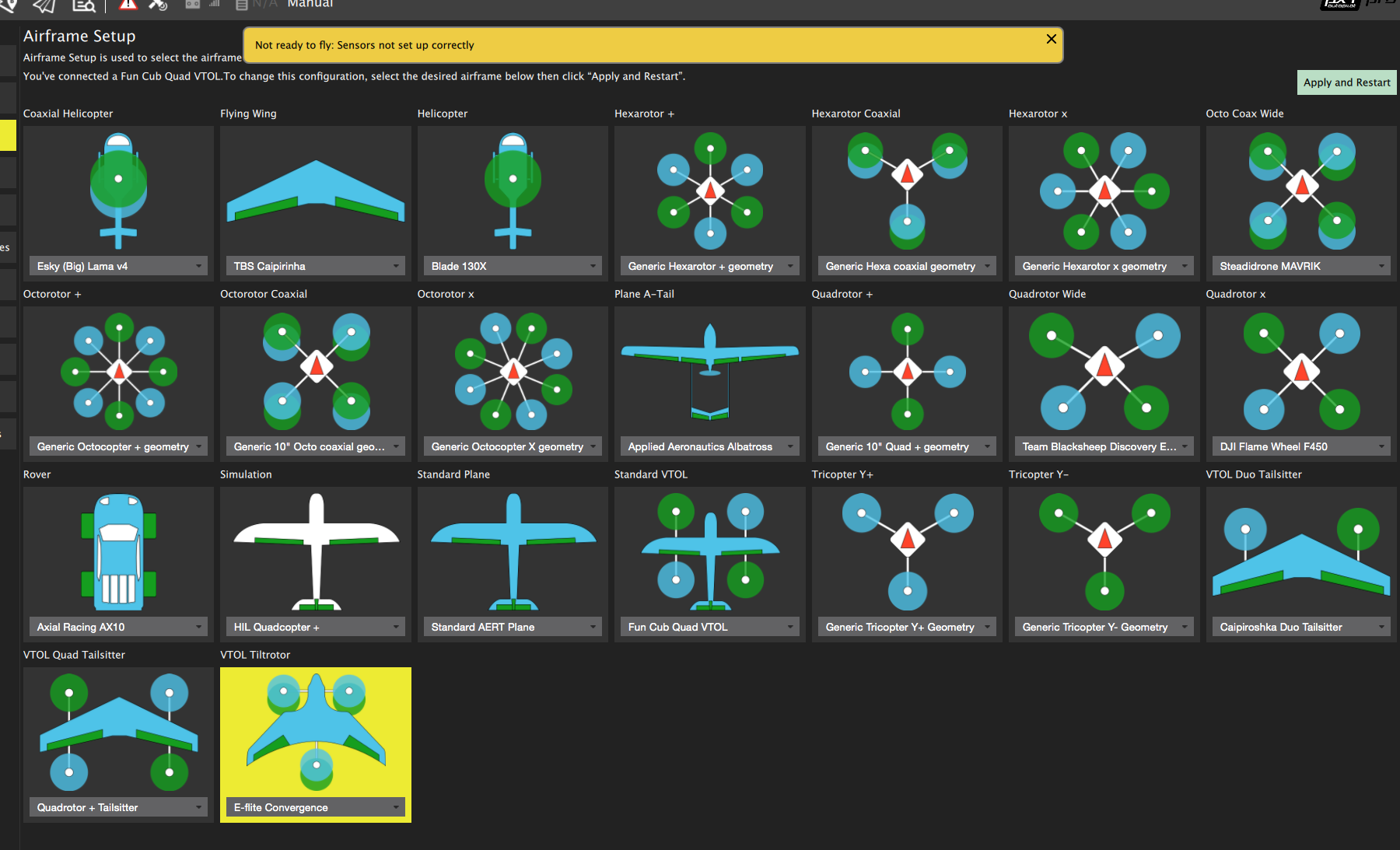
Support for E-flite Convergence is merged and available on master (Developer Build)
I have my PixFalcon plugged in. I don’t see the Convergence airframe list anywhere. How do I get to “flash the latest “Developer” version of PX4 and select the Convergence airframe”?
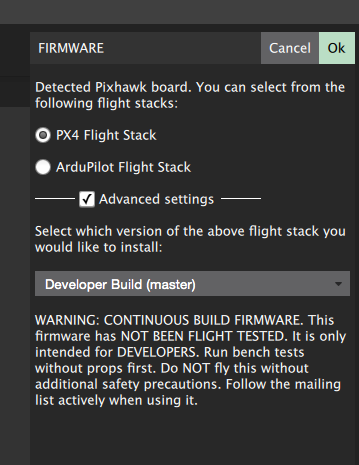
@ldsanders2807 The developer build you find when you flash the firmware and select “Advanced settings” (screenshot 1)
After flashing, please restart QGC. You should then find the E-flite Convergence in the group VTOL Tiltrotor (screenshot 2). Select that and press “Apply and Restart” (top right)
@AndreasAntener: That’s the info I needed. Thanks! What telemetry module do you suggest? And a suggestion on the digital airspeed sensor. I’m going to get my feet wet by installing the PixFalcon into my Convergence frame first. Then move on to my larger saucer shaped frame. This is going to be fun!
@ldsanders2807 I just want to mention first that the E-flite Convergence config doesn’t require an airspeed sensor. For later I’d recommend the voltage corrected ones from AUAV: http://auav.com/ (sorry it seems I can’t get the direct product link but you’ll find it under “Sensors”). If you plan on using that with the Pixfalcon you’ll need to modify the cables and get an I2C splitter on the bus.
For telemetry you can just go with something from Hobbyking if you like, they work quite well. For example the 433MHz version (if you’re in the US or Australia you need 915MHz): https://hobbyking.com/en_us/hkpilot-transceiver-telemetry-radio-set-v2-433mhz.html
@AndreasAntener I’ve watched the video of mission based flights with auto transition. Very cool! Will mission setup allow for flights that are either a transition based mission as well as VTOL only based missions?
Also, will this work for the telemetry set? http://store.uav-solutions.com/holybro-500-mw-transceiver-telemetry-radio-set-v2-915433-mhz/
You can do missions in any combination you want :). Transition forwards/backwards is possible at anytime during the mission.
I assume the telemetry modules you linked will work. Just be ready to modify the cables for the Pixfalcon.
@AndreasAntener Making some progress with the Falcon/Convergence. I finally got it to arm.  And, Servos do need an external BEC. Do the elevons move in the same way as the Convergence FC? Meaning, in hover mode, the control surfaces do not move. In Forward flight, they do. I will do some more testing on this next item. But, when moving some combination of the agility/acro switch and transition switch, the transmitter no longer has control of the motors. In this mode, the transmitter’s motor kill switch does not function. Has anyone experienced this?
And, Servos do need an external BEC. Do the elevons move in the same way as the Convergence FC? Meaning, in hover mode, the control surfaces do not move. In Forward flight, they do. I will do some more testing on this next item. But, when moving some combination of the agility/acro switch and transition switch, the transmitter no longer has control of the motors. In this mode, the transmitter’s motor kill switch does not function. Has anyone experienced this?
BEC: sorry for not mentioning that on the build log, that’s one of these things that’s really natural for me but not so obvious otherwise…
The control surfaces always move. They also help in wind when in multirotor mode.
I’m not familiar with the problem you describe. It would be helpful if you could find out how to reproduce that exactly.
@AndreasAntener First, I appreciate your help. I have flown airplanes for a long time. I’ve never flown a multirotor of any kind and have never work with a flight controller. So, I’m starting at first grade on this project. But I’m committed. I’m making progress! I’ve added the telemetry set and seems to be working. My question relates to SW A. The original Convergence Stability/Agility control is channel 5, SW A. Seems the PixFalcon Convergence has a different definition for SW A than the original Convergence FC. QGC says “Mission” when SW A=0, and when A=1 it says Manual Flight mode. Is that what SW A should be doing? Then, when in Mission mode, the controls no longer function by design and the mission plan takes over? Next, I’m struggling with Flight Modes and what flight modes I should set up. I’ve read the info at http://px4.io/docs/flight-mode-configuration/ But, it’s not soaking in. What flight modes should I set up?
@fsflyer is it just tuning or do you need an offset for the yaw controller? Posting logs is usually helpful.
This is my second try at using a blog. I’m still new to this, please bear with me. I’m trying to use the E-flight convergence firmware in a FX-61 Phamtom wing. The hardware is in place and the electronics are installed, A Pixfalcon, compass, telemetry, and RC. The problem is stability. With Qgroundcontrol in the stability mode the plane pitches rolls and yaws erratically, as if stabilization isn’t enabled. I know this is limited information. I can send anything else you need to help me with this problem .
Mike
Please upload a log file from your flight and post the link here (for .px4log files go to http://logs.uaventure.com/, for .ulog files go to http://review.px4.io/). The tuning parameters are most likely wrong for your build.
Does the Convergence with the Pixfalcon have full stabilization like a multicopter??
Couldn’t tell from the videos. Didn’t see a loiter mode mentioned either.