Dear Developers and community,
I as a newbee to PX4 and VTOL, not able to find much on getting started with setup, configuration, tuning guides(for VTOL and FW) and support for tailsitter.
So I am starting a new topic wher I would post my queries/issues and expect(request) the experts to respond.
Now starting with the setup,
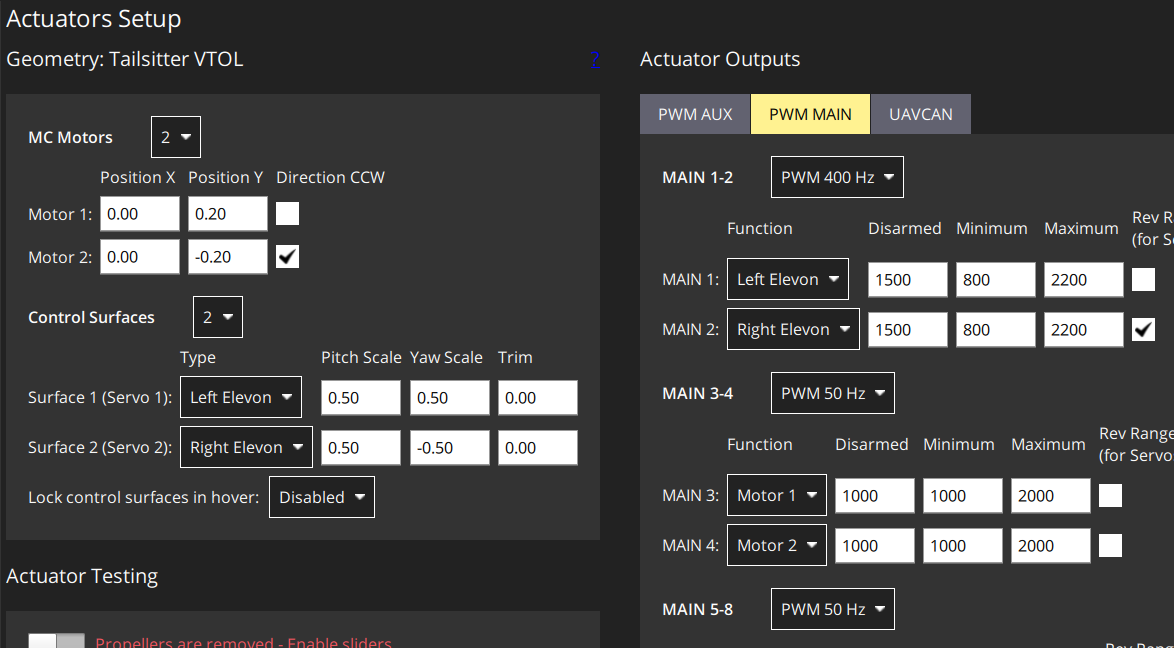
I have started something as in the above image and for the sensors calibration, I have kept the front direction of FC parallel to the nose of the bird while calibration I got to know that it should be done as for the multi-copter. So for this I have to change the orientation of the FC to pitch 90(right?). What about the GPS and the compass in it then?
Now to start with the VTOL tuning I use this page,
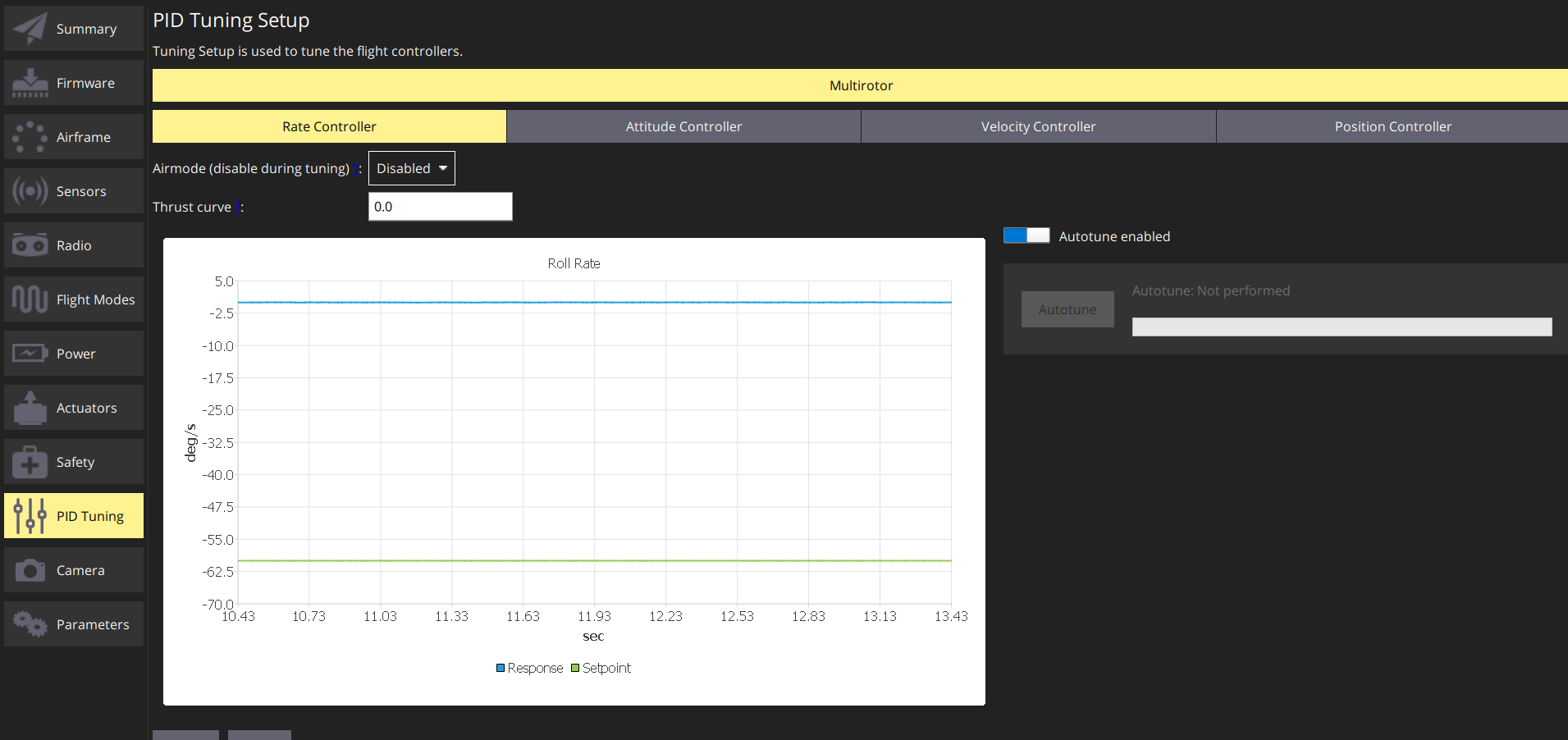
Which one should i start with from the basic to advance.
If this is for just the VTOL, where and how to complete fixed wing tuning?
Once this VTOL and FW tunings are done, I suppose for the transition there are direct parameters and I have to check with them. How do i validate the transition is correct or wrong (apart from flying with the logs?) and how to make it better?
One more thing, I want to know if the noise filtering is needed on the VTOL’s and set up of that also.
What about the flight modes, I see that flight modes for the fixed wing is same as the multicopters on the wiki and not able to understand how it is different for FW and MC’s. Is ther anything like FBWA /FBWB/Cruise for the fixed wings?
Once the transition is done, on which mode the flight will be just after the transitions?
Should i be using the different switches for VTOL, FW and transition?
Most important question of the topic is that, Can i fly the VTOL part without GPS?
If yes I would like to know how to configure that.
Also, is it possible to use the Optical flow for the VTOL for the position hold and althold and use the range finder and OF instead of GPS and baro?
I have this running in mind from so long and want to work on this for the VTOLs’ aswell.
Sorry(if i sound dumb), but I would like to know everything.
Thanks!