@generator FYI
@tumbili thank you! just updated the firmware and it looks good, the hand held test was ok, today a bit later will make a field test and will report!
Hi Roman,
the manual control issue is solved, works right.
I finished with a crash, but it was my fault - I started a back transition from fixed wing flight to multicopter flight too low and was flying too slowly loosing height…
- hoovering works well, no drift on any axis
- transition from multicopter to fixed wing works well
- manual control works well, pitch and roll are “fixed” to the airplane and not oriented to the arming position
-
- still did not test the back transition, this will follow soon (the plane is already fixed again)
Thank you for the help!
Ivan


@generator Thanks for the testing and sorry for the crash. I would like to try something for the backtransition. The duorotor has the problem that it cannot pitch up at low speeds if thrust is too low. Therefore, I would like to give the user the chance to influence the thrust during backtransition. Are you interested in testing this?
@tumbili yes, sure, please do that! as i am trying anyway a few more things out i got an easy to repair plane and two more are half ready - all are for testing. thanks!
I am really interesting in building one of these and testing it out. Do you know if there are any limitations on designing a commercially available version? As in if I design the frame/motors/hardware if I could use this code in my product that I would sell?
Greetings to all VTOL pilots,
I am just about to begin my adventure with dual rotor tailsitter (Caipirinha). The plane has been partially built and in mean while I am playing with Pixhawk controller. I have loaded latest greatest firmware, set proper airframe, calibrated etc… - now I wanted to ask to experianced VTOL pilots my questions - please forgive me if my questions will sound foolish :). Which of the pixhawk flight modes do you guys use for climbing/hovering and which for transition and level flight? I went through the forums and articles but did not find the clear answer - most probably it is obvious for everyone, but unfortunately not for me :). I would appreciate any type of advise…
Best regards, Jerzy
Although i can only advise on quadplanes, i would suggest to fly in ALTCTL
You may design and sell an airframe. you could provide px4 with it but you may not charge anything for the software and it must remain open (as far as i know)
I’m not a lawyer, but: https://github.com/PX4/Firmware/blob/master/LICENSE.md
Thanks a lot Sanderux.
Hi Devs/Users,
I’ve built a prototype duo rotor tailsitter, and I’m looking for advice on the following:
- Is there any additional documentation for this airframe type beyond this page?
- Is RC1 1.4.1 the firmware version I should be using if the intention is to test basic functionality?
- Similar to Paczlatam, I haven’t been able to find any documentation or comments that explains how transitions for this airframe type work. At this point, I’m assuming that unlike quadplanes where there is a dedicated switch, transitions occur automatically based on airspeed?
Thanks for sharing the work with the open source community, hopefully I have a chance to contribute to testing and development.
There was a bit of head-scratching to get both the controller orientation, and RC inputs working as they should. There’s no option to set orientation as Roll 180 and Pitch 90, meaning these values had to be offset manually, which breaks the accelerometer calibration and flight levelling routines in qGroundControl 3.0.
Through tethered testing, I then found I needed to reverse channels 1 and 2 on my radio to get the correct outputs. There’s potential for this to be automated during the radio calibration, but I’m still in the process of digesting how all the code works.
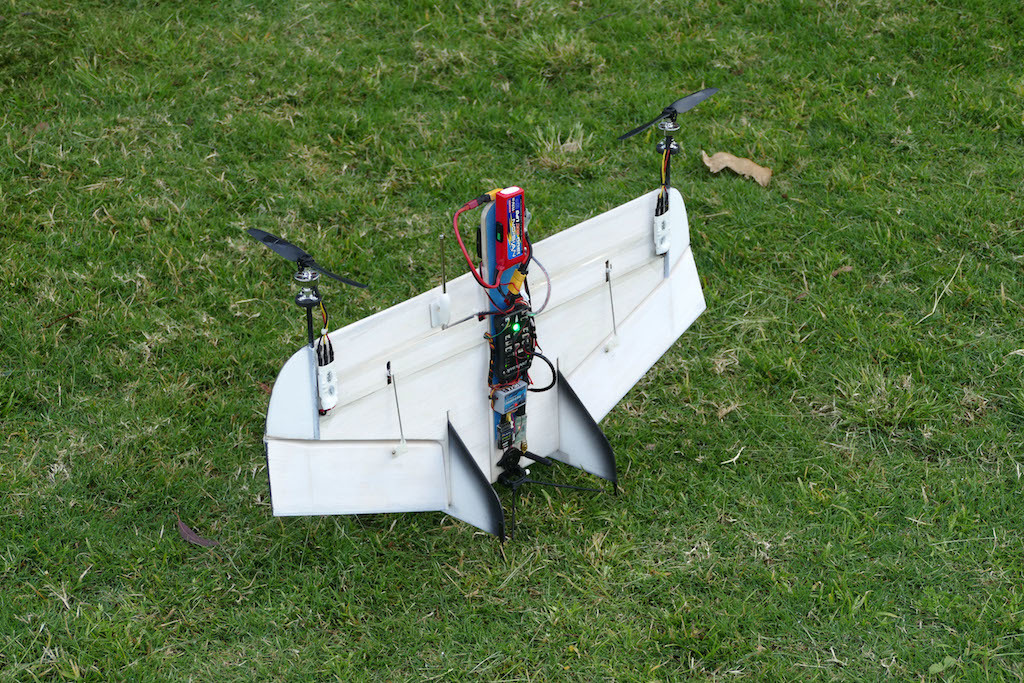
Waiting for better weather to carry out test flights, but I’ve attached photos of the prototype below. Construction is out of depron foam, 3mm & 6mm carbon fibre tubes, and balsa. It took around 4 hours to assemble, but could be built a bit quicker now that I know how everything should work together. It uses extremely cheap Turnigy park flyer motors with 8x4 props, 20A ESCs with SimonK that I had left over from a previous project, 1,300mAh 3S Lipo, an old analog airspeed sensor, and a 3DR Pixhawk that will be swapped for a PixRacer once my order arrives. All up weight is 550g, with around 800g of static thrust.

Hi Guy. I am also in the process of building a tailsitter VTOL and have been looking into how I would setup the Pixhawk. I had a very similar concern as you: how does the pixhawk know what is the new level flight orientation after it transitions from tail-sitting orientation to horizontal flight orientation?
When I calibrated my pixhawk, I did it for the tailsitting orientation (i.e., with “ROTATION_PITCH_90”). So when it pitches back down after it transitions to horizontal flight, the controller will get confused and think the horizon has shifted. Can you tell me how you addressed this issue? Somewhere in the VTOL code there must be a variable that you can set to tell the pixhawk its new level orientation after transition. But I don’t even know where to begin looking.
~Glenn
Hello Everyone,
My robotics team and I have built a tailsitter with the ritewing zephyr model. We are having issues getting it to hover. Here is the link https://drive.google.com/open?id=0B7Kz1MAIsMCAY2FOT0tsLVUxWEU to the videos from our first and second tests. Any suggestions on what you guys think we are doing wrong would be helpful. I’m not sure why it’s overcorrecting so much. Thank you!

Hello @generator
It would be great if you could help me out, I tried uploading the firmware and configured with rotation 270 YAW to match the compass heading and done the calibration but it doesn’t worked as expected.
Could you tell me in which configuration sholud i mount pixhawk in order to work correctly and also how to transit from multicopter to fixed wing mode.
waiting to hear from you.
A problem about VTOL transition without a air speed sensor?
I have built a delta wing ,as following Fig

I have set the parameters according to this two page 1)VTOL’S WITHOUT AIRSPEED SENSOR.2)TBS Caipiroshka.I have conducted indoor test and outdoor test.Now the plane can hover well .But MC-FW transition is failed !!
#The problem is:
when I Toggle transition RC switch which channel is assigned to AUX1,but the ailerons don’t response to the RC yaw and pitch input ,and then the plane is not under control.How to solve this problem?
