I’m building a VTOL Quad Tailsitter. It seems like there used to be a SYS_AUTOSTART = 13003 that would be used for Quad Tailsitters. That option doesn’t seem to exist anymore (PX4 1.14.0).
I found on the page Tailsitter VTOL | PX4 Guide (main), which discusses Quad Tailsitters that “Quad tailsitters are easier to fly in hover mode, and more stable in windy conditions. Both are supported using the same aiframe type in PX4.”
How should we setup for a VTOL Quad Tailsitter in PX4 1.14.0? Would be like the following?
- Under Airframes: select the “Generic VTOL Tailsitter” Airframe (SYS_AUTOSTART = 13200)
- Under Actuators: select “4” from the MC Motors drop down menu
- Under Actuators: input the X & Y offsets of the 4 motors
- Under Actuators: make sure motors 1 & 2 do have “CCW” selected but motors 3 & 4 do not have “CCW” selected
Yes, that seems to be correct
Then if you have control surfaces just add them in the same window. In case you don’t have any of them and rely just on differential thrust to control attitude, make sure to set CA_SV_CS_COUNT = 0 and VT_FW_DIFTHR_EN depending on your needs ( probably it will be set to 7 which is for the case you control all three angles with diff thrust)
Thank you for checking over my proposed settings.
I am planning on adding elevons (no rudders), but perhaps I should just lock the elevons in place for the first couple test flights.
I’ll post an update on what I find worked best.
Test flight with the aforementioned parameters worked great! I had been trying to hover a quad motor Tailsitter with the 4 motors inline, but didn’t have enough control authority in Pitch with just the elevons. By offsetting the motors so that two were X+ direction and two were in the X- direction (as opposed to all inline) and then using the new parameters resulted in proper flight and hovering in “tailsitter” mode. Next we will work on transitioning to fixed wing flight mode.
Hello @RaMansell
Could you please send some videos of your flight? did you manage to do the transition? are you using an airspeed sensor?
We have not attempted transition yet. We are currently working on dialing in the PID for hovering in multi-copter mode. Pitch and Yaw were easy, but Roll was the most off–probably because of having the four motors strung out along the wing like it is.
No airspeed sensor yet. It will be installed before we start attempting transitioning to fixed wing mode.
if you need help i can have experience with 2 meter copter tailsitter
Hi @RaMansell
Can you tell me if your tailsitter was in x or + configuration? I am building one in + configuration and I was wandering what motors on frame you set as CW and CCW.
Hi @RaMansell, any update on your new build and flight test?
Sorry @Pigwomaniak , I forgot to send this message!
We used an “X” configuration:
Motors 1 & 2 = CCW
Motors 3 & 4 = CW
Motor layout was just like the “Standard VTOL” airframe like on the Airframe Reference page (Airframes Reference | PX4 Guide (main)).
The only difference is that since ours was a tailsitter, the belly of the plane was toward the 1 & 3 motors and the top of the plane was toward the 2 & 4 motors.
No major update yet, but should try transitioning to fixed wing mode next (once the rain stops!) We’ve been stiffening and lightening the chassis which has helped a lot with control authority in multi-rotor mode. I’ve very happy with its current multi-rotor performance and am now confident enough to try transitioning. This way if the fixed wing flight becomes unstable, we can switch back to multi-rotor mode and achieve stability without crashing.
Okay, all the best! Since I am also working on PX4 Quad Rotor tail sitter, was interested to know the progress.
And below is the overview of my setup.
Firmware: PX4 V1.14.3
Airframe: Generic VTOL Tailsitter
Airframe geometry: Tandom wing (Equal wingspan and both the wings are mounted at two different plane)
Propulsion: 5008 400KV motor with 16" props (6S setup)
Control surface: 4 elevon (front two elevon will be moving in opposite direction since its ahead of the CG) with differential thrust for Pitch and Yaw for FW (Fixed Wing)
We were able to tune the multi-copter to extent where we can easily switch back to MC mode if FW mode is not working properly.
We have done couple of FW transition, but the result was not fruitful.
Can you briefly explain about your control surface config for both VTOL and FW mode?
Thank you
That’s awesome! That’s exactly what we have a tandem wing aircraft but with 8 motors and a two control surfaces. You need to configure your airspeed sensor very carefully!
@Farkhod_Khikmatov, so have you tried transitioning to fixed wing?
Yes I have had multiple flights. Mine is for a company I can’t send a photo but we had very much hard time transitioning in the beginning due to airspeed requirements. We are also 12s powered right at around 24kg
Thats great! Is your aircraft similar to Pivotal black fly or Rivus II? and also can you brief me about configuring the airspeed sensor? I am facing a hard time in front transition.
Ours is not for human transportation. We made it like H-wing style. And for airspeed sensor make sure it’s facing the incoming air. Use dlvr airspeed sensor. Or spd
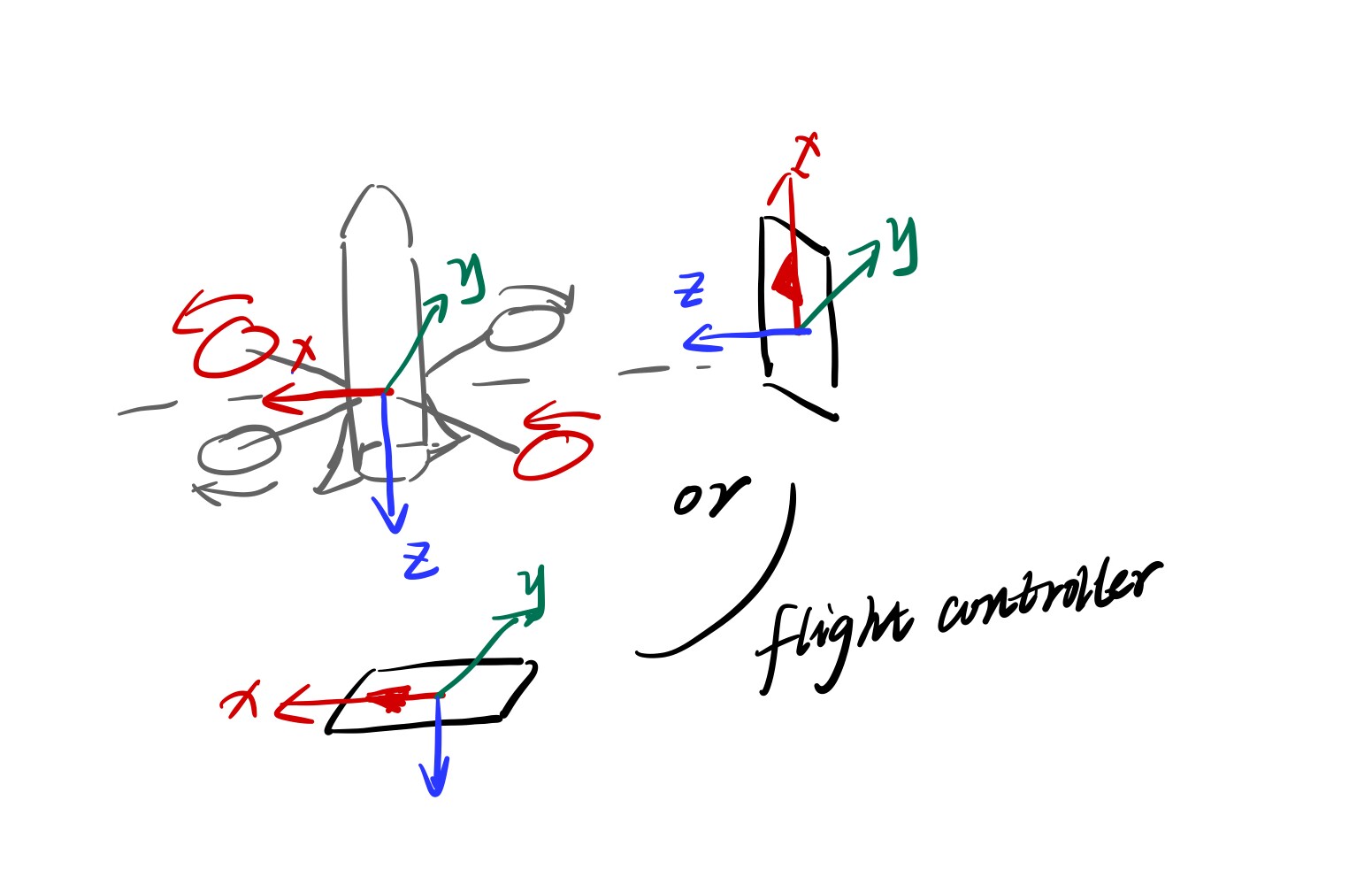
Excuse me!I am a newer to VTOL,which comfused me a lot is how to install the Pixhawk flight control system of tailsitter?For the Multicopter Mode, the Rotors Geometry is defined as ‘NED’,and in airframes file the CA_ROTORx_PX/PY prove this frame direction true. so if the Pixhawk Flight Controller is fixed in the Multicopter Frame or along the Fixed Wing Head Direction? And if I need to set the PX4 Param " SENS_BOARD_ROT" to switch the FMU direction?
Thanks a lot for reply !
I am sorry but your question is very confusing. Do you have pictures? Or send a email to khikmatov.farkhod@gmail.com
Have you solved this question?Im facing the same.