Hi,
We are currently in the process of building and testing our new drone, which is equipped with an Orange Cube+ flight controller running the latest official PX4 firmware release. The drone is intended for outdoor missions over large areas. However, before proceeding with untethered outdoor flights, we aim to ensure the system’s reliability through extensive indoor testing under tethered conditions.
For safety, the drone is tethered from above using a roof-mounted rope. An elastic damping element is integrated into the tether to absorb sudden downward forces, reducing the risk of damage in case of unexpected descent. This setup results in a small but continuous upward force acting on the drone during flight.
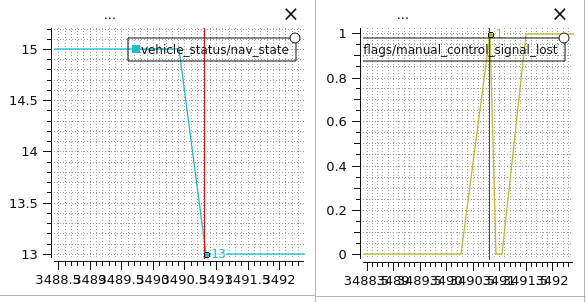
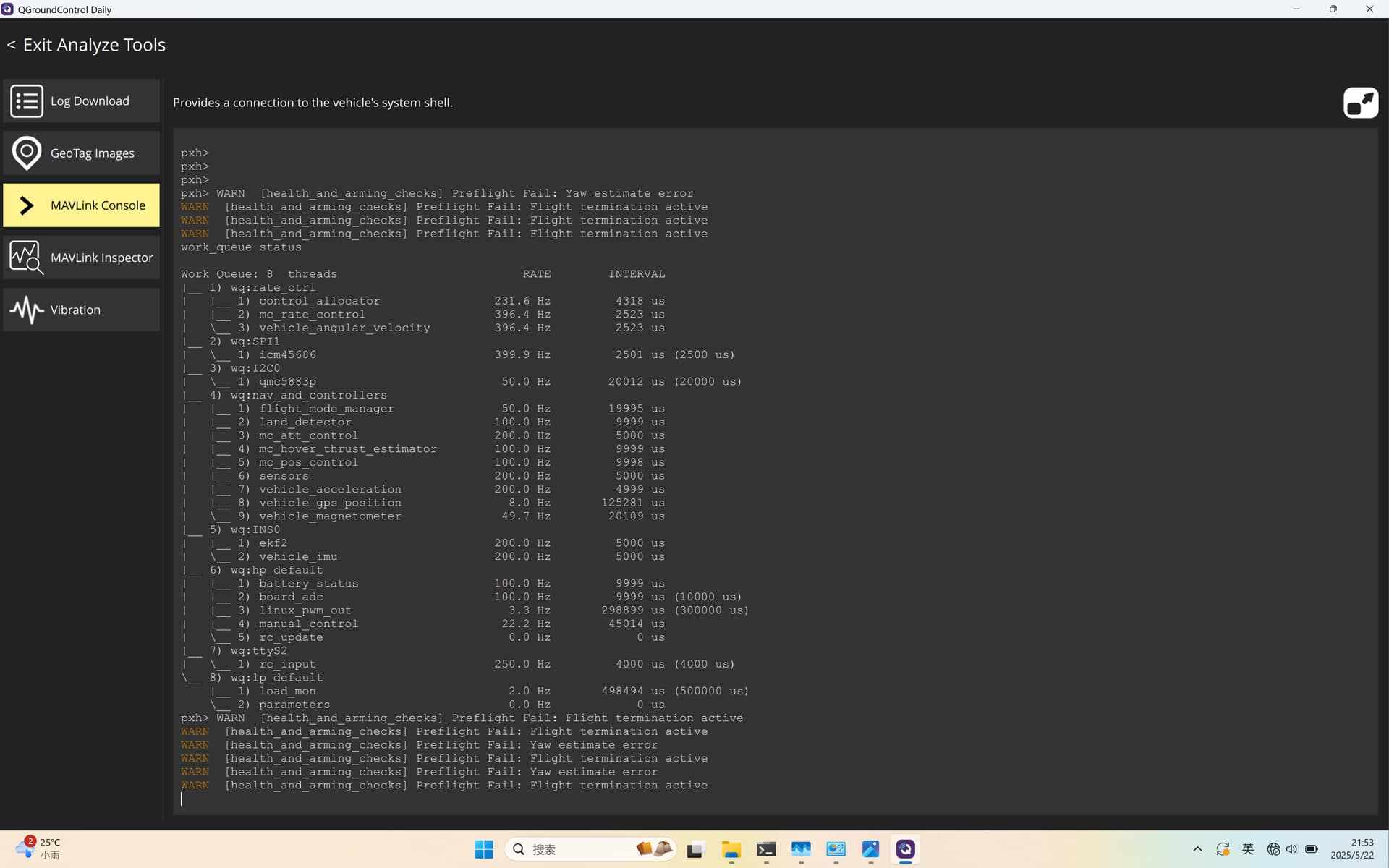
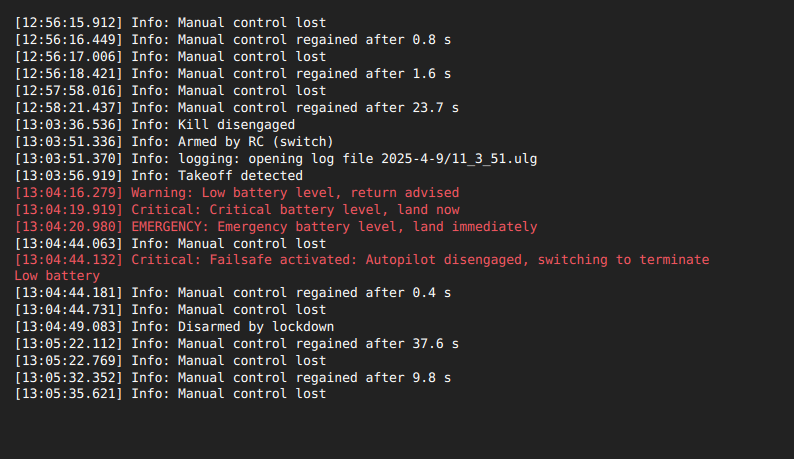
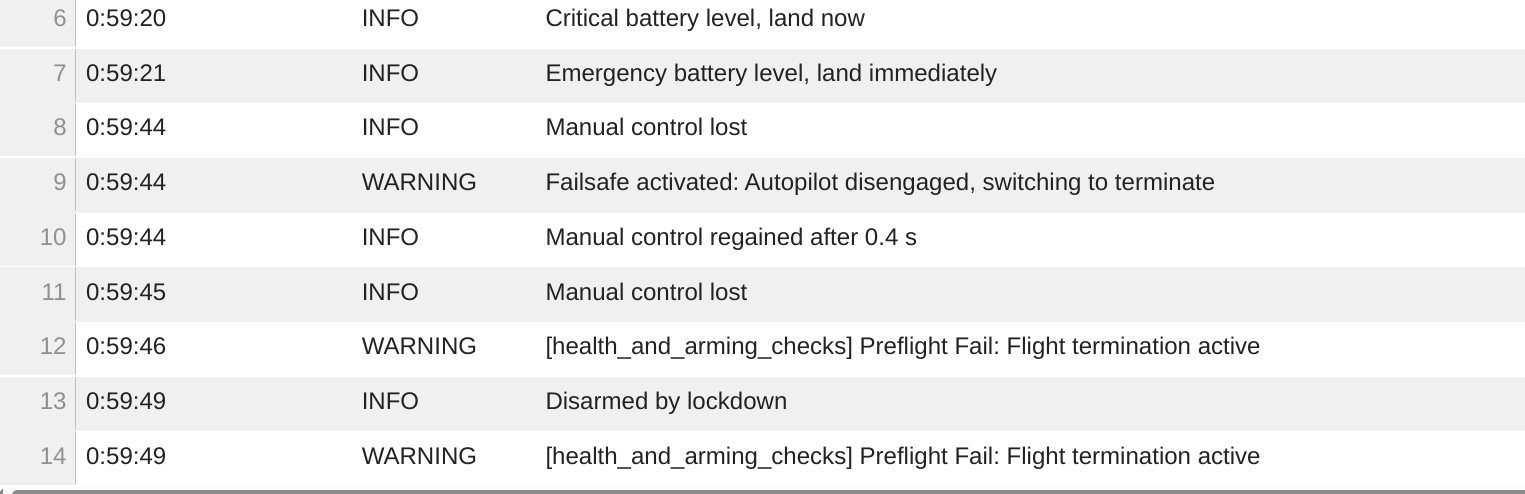
During one of our indoor tests in Stabilized Mode, approximately 40 seconds after the autopilot detected takeoff, the motors suddenly stopped. If the drone had not been tethered, it would have crashed. To determine the root cause of this incident, I analyzed the flight logs (link here), reviewed the PX4 source code, and used the failsafe simulator to test various failsafe flag configurations.
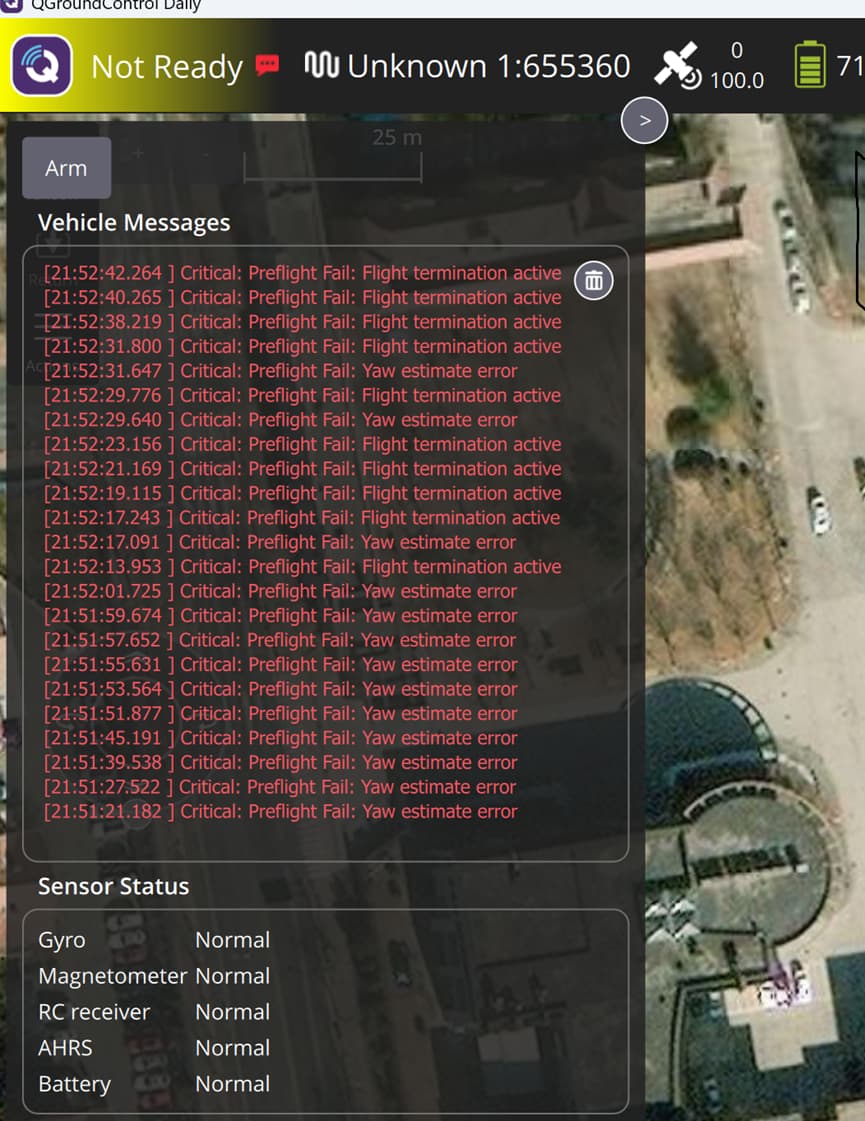
QGroundControl displayed an unknown error message (Unknown 1:655360) at the time of the failure. Despite attempts to reproduce the issue under similar conditions and with our current parameter settings, I was unable to replicate the behavior observed during that specific test.
In addition to the log data linked above, a summary of the most relevant information is provided below. Any support in identifying the cause of this failure and in finding strategies to prevent similar events in future tests would be highly appreciated.
Most important Parameters:
- COM_ACT_FAIL_ACT: Warning only
- COM_DISARM_MAN: Enabled
- COM_DISARM_PRFLT: 10 s
- COM_DL_LOSS_T: 10s
- COM_FAIL_ACT_T: 5s
- COM_FLTT_LOW_ACT: Return
- COM_HOME_EN: Enabled
- COM_KILL_DISARM: 5s
- COM_LOW_BAT_ACT: Warning
- COM_POSCTL_NAVL: Altitude/Manual
- COM_RC_IN_MODE: RC or Joystick keep RC first
- NAV_RCL_ACT: Return mode
- NAV_DLL_ACT: Disabled
- COM_RC_LOSS_T: 0.5
- EKF2__EV_CTRL: 11 (Position, Yaw)
- EKF2_HGT_REF: Vision
Conditions:
- Even-though we had enabled External State Input with the EKF2 setting we did not provided a valid pose
- Manual Control Loss (After the flight the RC was disconnected completely)
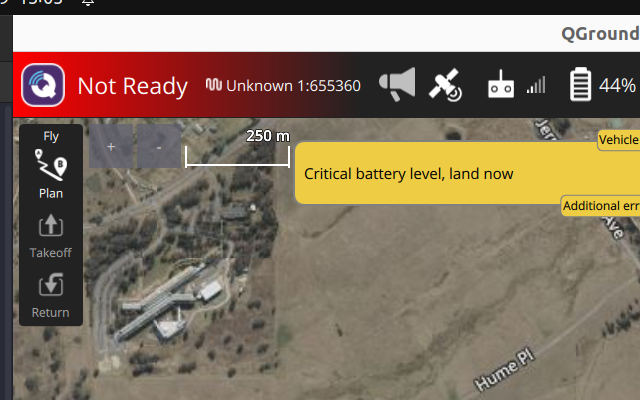
- Battery was still on 21 V (6S)
- But we did not calibrated the battery and therefore PX4 thinks we are at 2 % Battery level
- We had no valid global position estimate
- We had no local position, altitude, velocity estimate
- We had no home-position
General Questions:
- What was the root cause? Why did the system not initiate a descent or landing procedure and instead transition into the Terminate state?
- How can in-air disarming or triggering of Terminate failsafe actions be prevented?
- Was the issue caused by the PX4 firmware, or could it have originated from a hardware malfunction?
We would be grateful for any assistance in identifying the root cause of this failure and in understanding how to prevent similar incidents in future tests. Please let us know if you require any additional information or specific data to support your analysis. Thanks in advance for your help. ![]()