Hi everyone, I’m having an issue with sending battery status data from a ROS node to QGroundControl using MAVLink.
What I’m trying to do:
I have a ROS node that reads battery data (voltage, current, percentage, capacity) and sends it to QGC using the BATTERY_STATUS MAVLink message at 0.5Hz.
The goal is to display the battery status correctly in QGC.
The problem:
In QGC, the battery percentage is displayed correctly, however, I still get a Vehicle Error: Failsafe activated due to low battery level, triggering RTL in 5 seconds. when trying to takeoff.
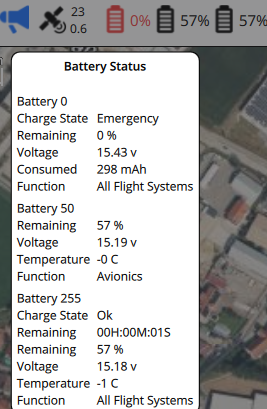
When clicking on the displayed battery, I notice that the time_remaining field always shows 00H:00M:01S, regardless of whether I: calculate the time remaining, set it to a fixed value or to invalid (0). Also it says battery 255, is this the ID? If so, it should be 1.
Relevant code (ROS node):
def send_battery_status(self, drone_id, voltage, current, percentage, capacity):
# Create MAVLink battery status message
msg = mavlink.MAVLink_battery_status_message(
id=int(drone_id), # set to 1 for drone1
battery_function=1,
type=1,
temperature=32767,
voltages=[int(voltage)] + [65535] * 9,
current_battery=int(current / 10), # Convert current from mA to cA
current_consumed=-1,
energy_consumed=-1,
battery_remaining=int(percentage)
)
raw_msg = msg.pack(mavlink.MAVLink(self.mavlink_system_id, self.mavlink_component_id))
self.sock.sendto(raw_msg, (self.mavlink_target_ip, self.mavlink_target_port))
Additional details:
PX4 Firmware: v1.14.2
QGC Version: v4.4.3
Battery Monitoring Source (in QGC): Disabled
When checking the drone1/mavros/battery ROS topic and on the PX4 terminal using listener battery_status command the data seems to be correct but the error still triggers.
INFO [commander] Ready for takeoff!
pxh> listener battery_status
TOPIC: battery_status
battery_status
timestamp: 1736438079006182 (0.003000 seconds ago)
voltage_v: 22.76800
voltage_filtered_v: 22.76800
current_a: -1.17000
current_filtered_a: -1.17000
current_average_a: 0.00000
discharged_mah: -1.00000
remaining: 0.64000
scale: 0.00000
time_remaining_s: 0.00000
temperature: 32767.00000
voltage_cell_v: [22.76800, 0.00000, 0.00000, 0.00000, 0.00000, 0.00000, 0.00000, 0.00000, 0.00000, 0.00000, 0.00000, 0.00000, 0.00000, 0.00000]
max_cell_voltage_delta: 0.00000
custom_faults: 0
average_power: 0.00000
available_energy: 0.00000
full_charge_capacity_wh: 0.00000
remaining_capacity_wh: 0.00000
design_capacity: 0.00000
nominal_voltage: 0.00000
capacity: 0
cycle_count: 0
average_time_to_empty: 0
serial_number: 0
manufacture_date: 0
state_of_health: 0
max_error: 0
interface_error: 0
faults: 0
average_time_to_full: 0
over_discharge_count: 0
connected: True
cell_count: 1
source: 0
priority: 0
id: 0
is_powering_off: False
is_required: False
warning: 0
mode: 0
pxh> commander takeoff
pxh> INFO [commander] Armed by internal command
INFO [navigator] Using minimum takeoff altitude: 2.50 m
INFO [tone_alarm] arming warning
WARN [failsafe] Failsafe activated, entering Hold for 5 seconds
INFO [tone_alarm] battery warning (fast)
INFO [commander] Takeoff detected
WARN [failsafe] Failsafe activated
INFO [navigator] RTL HOME activated
INFO [navigator] RTL: landing at home position.
INFO [navigator] RTL: climb to 0 m (1 m above destination)
INFO [navigator] RTL: return at 0 m (1 m above destination)
INFO [navigator] RTL: descend to 0 m (1 m above destination)
INFO [navigator] RTL: land at destination
INFO [commander] Landing detected
INFO [commander] Disarmed by landing
INFO [tone_alarm] notify neutral
INFO [logger] closed logfile, bytes written: 8381639
Hi @manudelu , could you share a flight log that contains the failsafe event? Hard to troubleshoot without, maybe there was a misconfiguration, maybe a PX4 bug.
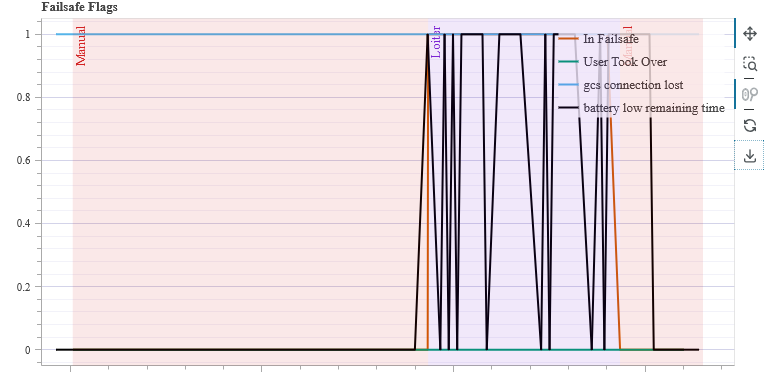
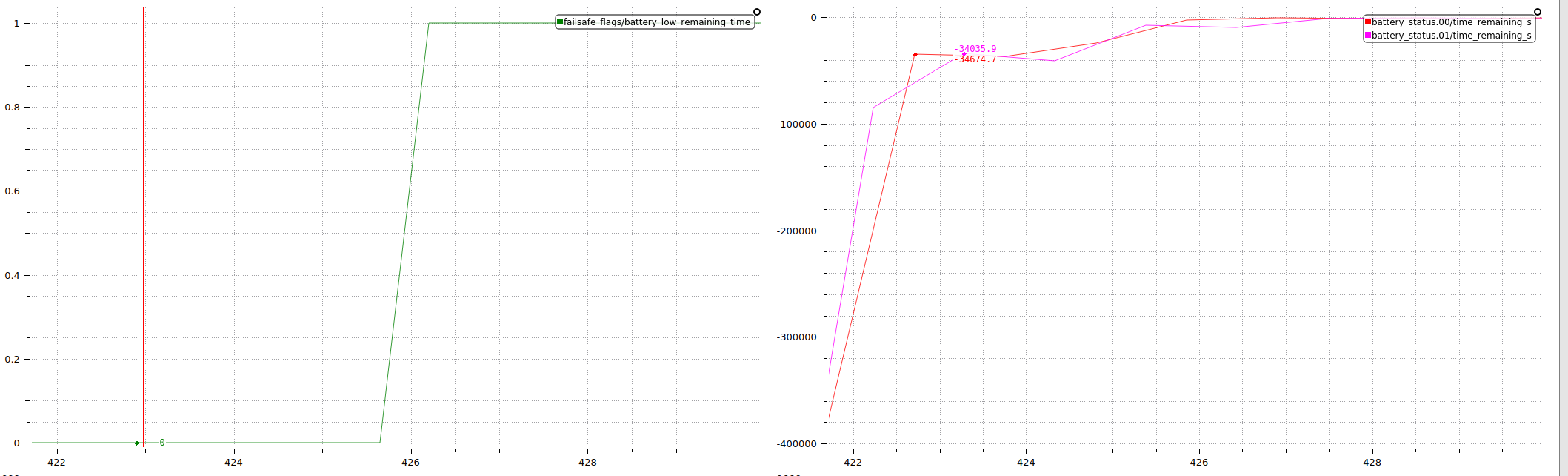
So I had a look at the log, somehow the failsafe “battery_low_remaining_time” gets triggered on arming. You can find the code for it here. The condition that triggers it is battery_low_remaining_time < rtl_time_estimate, where in your case battery_low_remaining_time is all the time 0.
To why it is 0: Here I’m no longer certain, the only paths I see form looking at the code is:
you get the battery info through the UavcanBatteryBridge, and as the remaining_capacity_wh is 0 in your case the time_remaining in this line is also 0. This line contains an error, as the time_remaining field should be NAN if the battery capacity is not known.
I don’t understand yet how you receive the battery information at all on the PX4 side, given you have BAT1_SOURCE set to -1.
What I would recommend you is either to update to a new PX4 version, where you can disable this failsafe, or check if changing the line in the uavcan bridge fixes it.
@manudelu have you resolved this?
we have the same problem of our vehicle randomly entering rtl or loiter mode because of a low remaining flight time. We already use a version including the pr mentioned by @sfuhrer and have set the COM_FLTT_LOW_ACT parameter to None, but seems like it still enters failsafe when the remaining time is just one second.
The QGC Mavlink Inspector the battery status of a battery id 255, with remaining flight time 1s, but We never publish any mavlink message with this battery id, just one coming from a secondary component (26) with id 50 and the one from the power module with id 0. Both with remaining_time 0 (which is treated as nan according to mavlink documentation ). I suspect this code in the pixhawk firmware somehow messing with the uorb message (id flips from 0 to 255 due to -1 on an uint8 and the max() function sets the flight time remaining to 1 instead of 0. The faulty message gets published by component 1 (the pixhawk) but copies the voltage published by the secondary component under id 50.
We’re experiencing the exact same issue, and unfortunately, I haven’t managed to solve it either. I also suspect it’s related to some issue in the Pixhawk firmware code. I’ve put the idea on hold for now, but if you happen to find a solution and are willing to share it, it would be greatly appreciated!
Initially we were running selfcompiled 1.15.2 (crossfire support), I now tried 1.15.4 and the current state of the main branch and for both the problem still exists.
I also tried some changes to the code snipped I linked above:
// TODO: Determine how to better map between battery ID within the firmware and in MAVLink
if (battery_status.id != 0) bat_msg.id = battery_status.id - 1;
else bat_msg.id = battery_status.id + 1;
[...]
// MAVLink extension: 0 is unsupported, in uORB it's NAN
bat_msg.time_remaining = (battery_status.connected && (PX4_ISFINITE(battery_status.time_remaining_s))) ?
/*math::max(*/(int)battery_status.time_remaining_s/*, 1)*/ : 0;
this removes the 1s time remaining, but I wasn’t able to field test this yet and not sure what other unwanted effects this has.
finally got to field test this yesterday, seems like the 1s remaining time doesn’t show up anymore in the mavlink inspector (the battery that was id 255 now shows up as id 1, but without a time_remaining value). But the vehicle still enters failsafe after a launch is detected and the uORB failsafe_flags topic (checked via the listener command) still shows the corresponding flag (battery_low_remaining_time) turn true. So our solution for now is setting the corresponding failsafe actions in /src/modules/commander/failsafe/failsafe.cpp to None. This seems to work, but permanently disables this failsafe. (@manudelu )
@moritzNeo could you share a flight log of your most recent testflight here? Where it still entered the failsafe even though it should have been disabled.
Can you test the v1.16 release candidate? There were some fixes in the failsafe logic since v1.15.0.
Would also be interesting what’s causing these negative time remaining estimates.