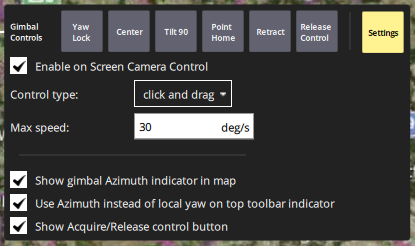
These are the gimbal controls I can see in QGroundControl when I use the SIYI A8 Mini with an flight computer running ArduPilot.
I can see that there are 2 options in Control Type - Click to Point and Click and Drag.
Can someone please let me know how to use them when I have selected one of the control types?
For ArduPilot I suggest to ask in discuss.ardupilot.org instead.
@JulianOes
The doubt is related to using the gimbal with QGroundControl.
Mission Planner offers a straightforward interface for payload control where the Pan, Tilt and Roll of the gimbal can be controlled using sliders and it is easy to understand how to use it.
But I am using QGroundControl as the GCS software as it is adaptable to platforms of lower screen sizes. Siyi offers its own version of QGroundControl to use the gimbal but I cannot run 2 QGroundControls simultaneously on the same GCS device.
I have no other option but to use the gimbal controls that the standard QGroundControl offers and I want to know how to use them.
Have you updated the firmware for gimbal and camera of the SIYI camera?
And have you followed the ArduPilot instructions how to set up the SIYI gimbal?
Yes, I’ve followed the ArduPilot instructions to set up the gimbal and camera.
Yes I’ve upgraded the firmware.
My only doubt is how to use the click to point or click and drag control.
Where am I supposed to click? Where am I supposed to drag?
I have no idea what you are using for a control device/GCS but I am using an SiYi Mk32 Hand Held GCS. The device is built around a repurposed QualCom cell phone and it runs a custom version of QGC and Android version 9. Gimbal control (pan and tilt) is done with touch screen gestures. Camera control is done by tapping the on screen camera controls.
Hi @oldgazer thank you for your response. I was trying to avoid buying the handheld GCS just for using the gimbal. But anyway, I will figure something out.
I see where your confusion is. Mission planner has some built in “payload controls” that allow you to set the mount to either RC Targeting or MavLink Targeting. To see these controls look at the white bar below the HUD. Click Actions. Click Set Mount. This is where you set the mount to either RC or MavLink targeting. With RC targeting you can use switches/knobs to control the gimbal and camera. With Mavlink Targeting you click your mouse on the map screen. This brings up a smaller menu. Its really pretty straight forward.
Yeah I was finally able to get it working today @oldgazer
Once the RTSP Stream link has been set and the stream is running, it can be maximized using the pre-existing functionality that switches between map and video stream.
At this point, if the click to point is selected, one can click on any point on the video and the gimbal points there…
If the click and drag is selected, one can click on any point on the video and drag the mouse pointer and the gimbal follows…
So simple, that’s all I wanted to do…
Wish someone from the community had explained this, spent days trying to figure it out…
Glad you have it working. I have one hexacopter with a 3 axis Storm32 gimbal and a GoPro Hero 3 that is setup to use RC and Mavlink targeting. Right now I am dealing with an SiYi Mk32 hand held GCS, an A8 mini and an SiYi N7 (aka a customised Pixhawk 6C). As for not getting any other responses, for some reason this place is almost like a ghost town. The Ardupilot community is much more responsive.