I want to connect my SIYI camera module with my Flight controller. I know ardupilot has some drivers to do the same job. How can I do this using px4? I can’t find any documentation regarding this.
I used a RPi with it, see: GitHub - julianoes/siyi-a8-mini-camera-manager: Camera Manager for SIYI A8 mini for RPi based on MAVSDK
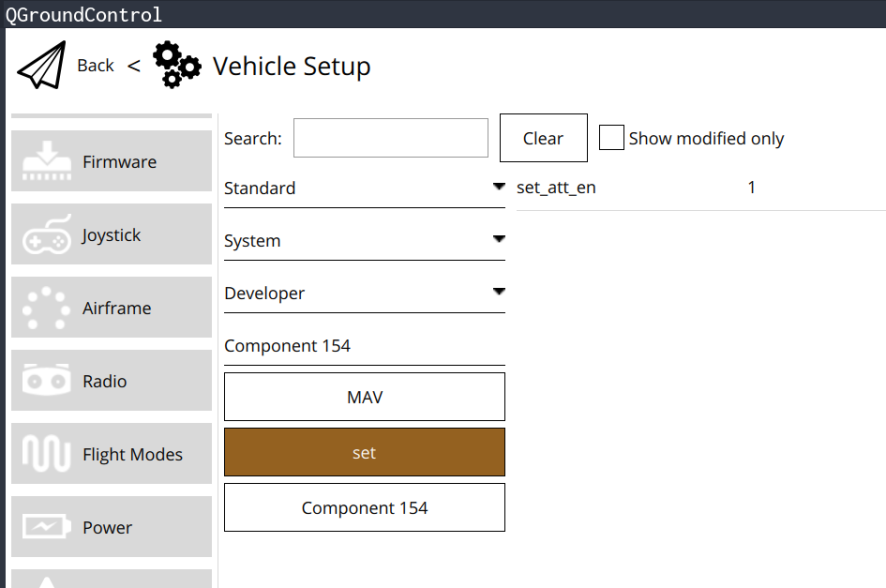
The gimbal (with latest firmware) talks MAVLink gimbal v2 which PX4 understands, however, unfortunately you need to set a MAVLink param of the gimbal each time it is started up to enable it.
For this, you have to connect the gimbal over serial and make sure the port is set to Forwarding On, so QGC can talk directly to the gimbal.
1 Like
@JulianOes your repo has the best instructions by far on this. It should really be added to the docs. @hamishwillee
Would be cool to see more info like this on px4 doc side.
@ryanjAA @JulianOes The whole camera section on PX4 is very “thin” Camera Configuration | PX4 Guide (main) - or more specifically it talks about the driver settings but is of little practical use if you want to connect a camera other than maybe by hard wiring.
We should fix that by at least linking to examples like this. Ideally we should split out the MAVLink section (at least) and provide links to the steps to getting it working AND link to specific examples.
My understanding here is that the linked repo builds a camera manager for the siyi-a8-mini-camera using MAVSDK server plugin. This can be connected tp the camera and exposes the MAVLink camera API (we should probably state "which parts - e.g. camera definition?).
The camera gets connected to the RPi Ethernet, and we can start the camera manager to connect to it. We forward RTPS streams from the camera to where they need to go (separately). We also connect the RPi to Pixhawk and set up PX4 to use that port for MAVLink
That pretty much it?
@JulianOes What do you think about me importing some or all of this tutorial into PX4 docs? I’d probably “chunk it up” because parts are common - such as the PX4 side setup. Other parts are not.
PS. Very cool @JulianOes
Yes, correct.
Pretty much, yes. The serial port from the gimbal goes directly to the Pixhawk but that’s not documented fully, I think.
Unfortunately, the firmware I tested this with was not officially released and the one released now has this annoying MAVLink param that needs to be set each time. This makes this all a bit harder to use and document. (See my notes here.)
It’s not straightforward, so I’d be tempted to just have a link to it. If you can use certain parts and add them as general “how to connect to a RPi”, that’s fine.
What I want to avoid is:
- Having duplicate docs. PX4 docs describing the camera-manager that are out of sync with what’s in my repo.
- Me having to do reviews, maintenance, updating of any SIYI docs within PX4. I very much have this as a one off repo on the side, so that I can manage it in one place, and do what I like. I can change it without having to update PX4 docs around it.
That is quite helpful but the SIYI camera manager is only for linux, right? Can’t we have something that can work as a cross platform?
The camera manager is on top of MAVSDK which is cross platform. What are you thinking, Windows? Or do you mean embedded?
The easiest way I found for using an SiYi A8 camera/gimbal is going all in with an SiYi Enterprise MK32E Handheld GCS and HDMI Air Unit combo.
One thing you may want to chage is the left (throttle/rudder) gimbal. The stock gimbal is return to center…
The attached picture is of my stretched Tarot 650 Sport with 5008 335Kv motors swinging 17" props on 6S.

hi guys, i am using the a8 mini and i connected it to my pixhawk 6c via a uart. i am using the tx16s. i can control the zoom of the camera but i cant control the pitch roll yaw. i followed this guidline SIYI ZR10, ZR30 and A8 Gimbals — Copter documentation
If you’re working on ArduPilot, perhaps ask on their discussion boards. In any case, I don’t have much experience with Gimbal.
Hi,
I’m using Siyi ZR30 with RPi for simple tracking. But when I zoom in the camera, the gimbal seem to be not able to compensate the vibration of drone. And when I check by code, I found the gimbal respond my control command after 150 ms. What is the problem with me ?
Hello how do you do simple tracking via raspi?
Im trying to control siyi cameras like ZR10 using esp32 thru Sbus to trigger capture image and set every 3seconds and when I activated it the camera only look downward