Hi, I am trying to create a model for babyshark airframe in gazebo. I changed the standard_vtol’s sdf file included ruddervators etc. Also i changed the babysharks mixer file (changed the order of the lines). My problem is, when i run the gazebo in the multicopter position mode everything works fine but can not transition to fixed wing. (Abort: Transition time out.)
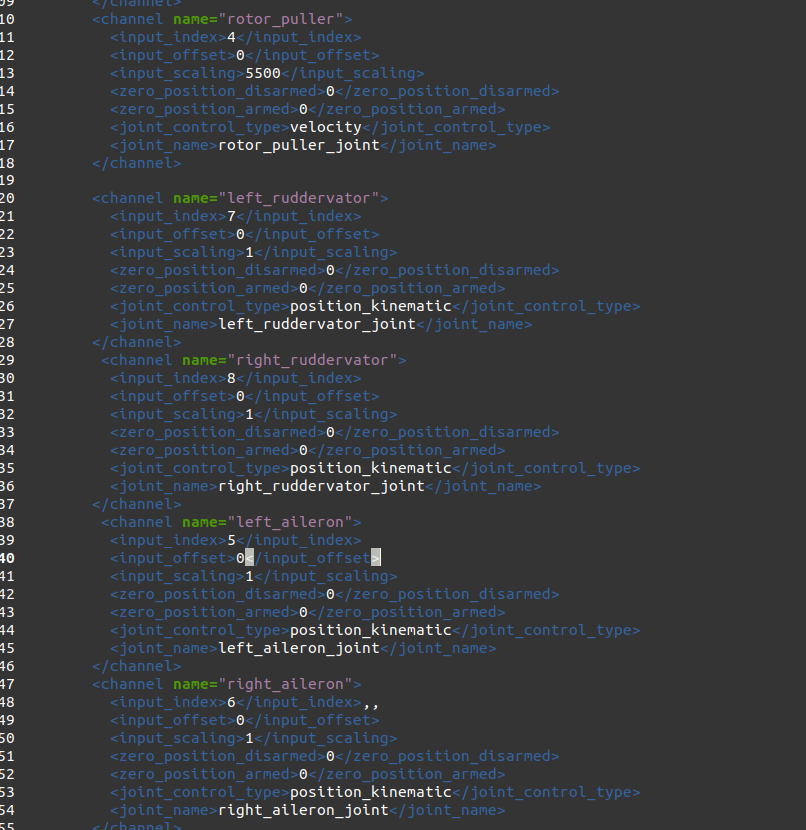
Here are my control channels in the sdf file:

Mixer file:

(I changed the orders in default rotor’s was 5-6-7-8 respectively but it didn’t work i don’t know why so i changed it to 0 1 2 3 and 5 corresponds to pusher rotor
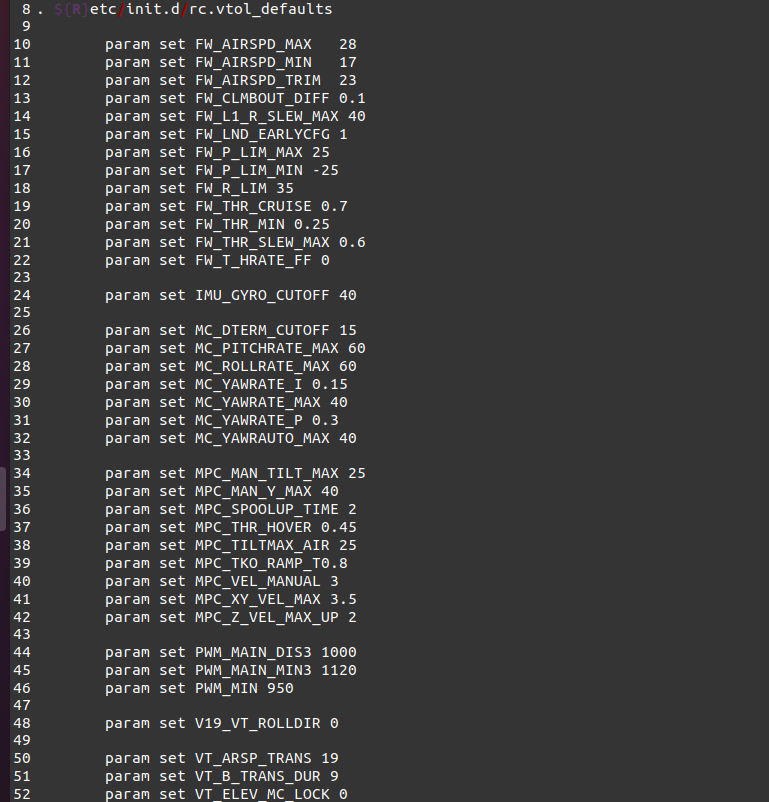
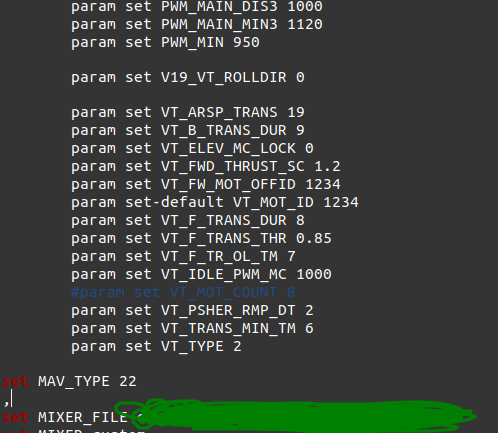
Airframe: