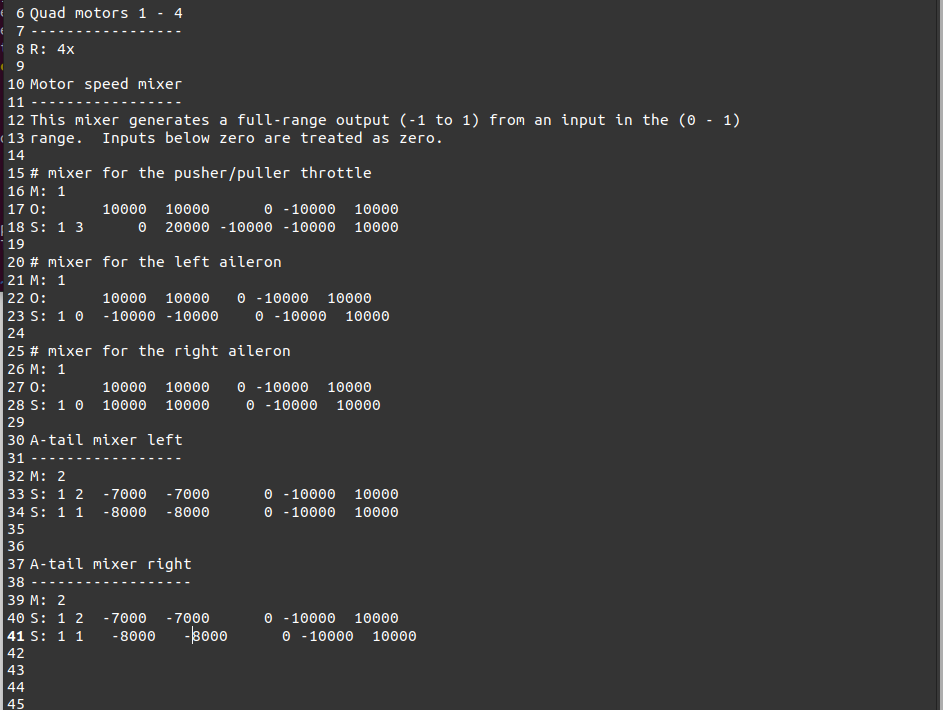
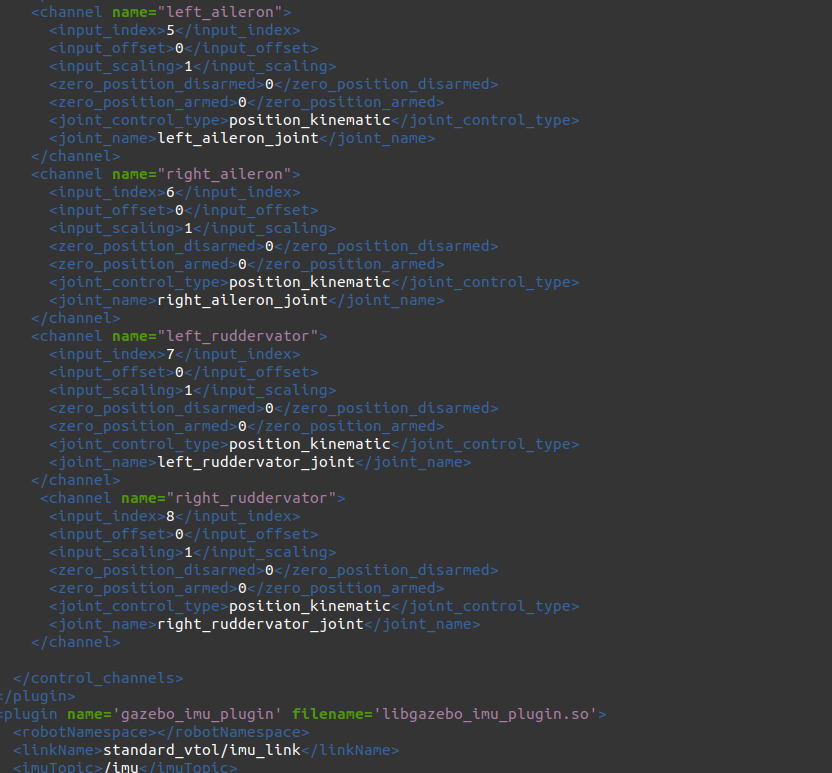
I am trying to simulate a inverted v tail model in a gazebo i was using babyshark airframe but servos didnt respond as expected so i changed the file a bit. In the babyshark mixer it says Y cable and puts 1 channel for both ailerons i made it 2 channel for left aileron and right aileron also changed left and right ruddervators control group index 1 (pitch) same sign for left and right. Does my mixer file correct? Also i am having a problem with transtion mc to fw. Pusher starts to work but forward speed doest not change
i can see pwm changes from the servo_output_raw in the QGC, Multicopter rotors doesnt stop also. I assume its due to it didn’t succed the transition. So far i tried;
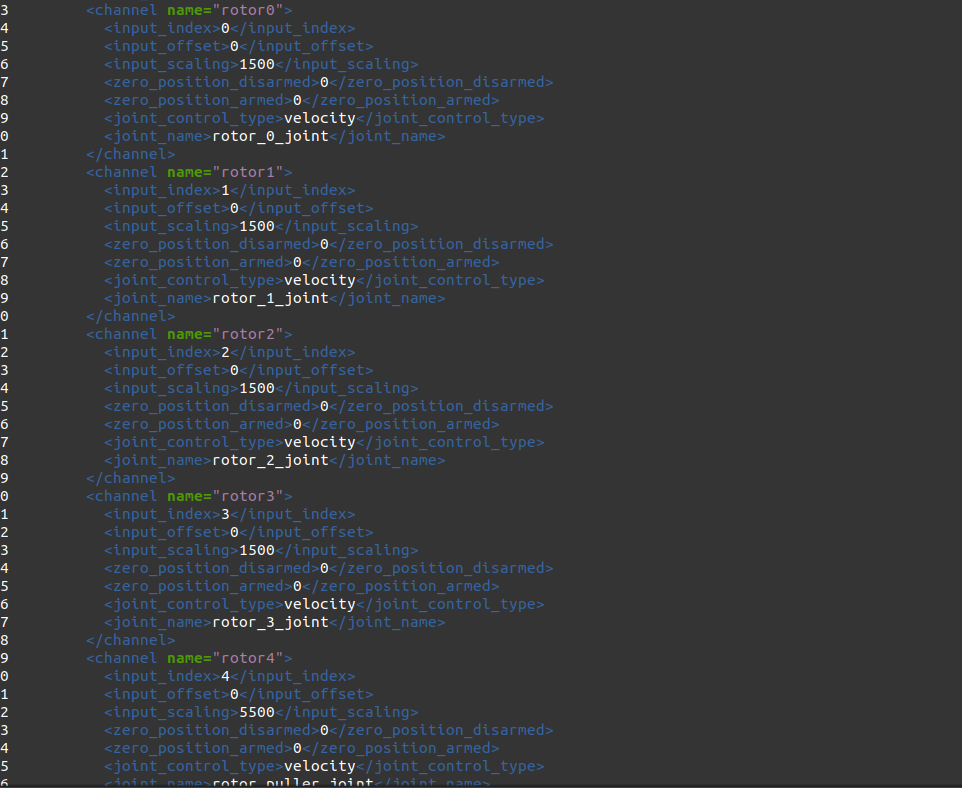
1- Changing sdf file control channels numbers.
2- Changing motor specs for pusher also in the sdf file.
3- Changing Parameters (for the one starts with fw_, mc_, mpc_ vt_).
4- Tried disabling airspeed sensor also did not work.
Do you have any recommendations?
I also did it in 1.13 ,changed the standard_vtols sdf file with the one i created also changed the standart_vtols airframe file with the babyshark one still vtol does the same behaviour when it tries to transition from mc to fw it times out and it seems like it’s going backwards instead of going forward in transition. I thought, it might be the imu’s rotation changed the SENS_BOARD parameter still does the same. I can upload the sdf file if needed. Any suggestions?
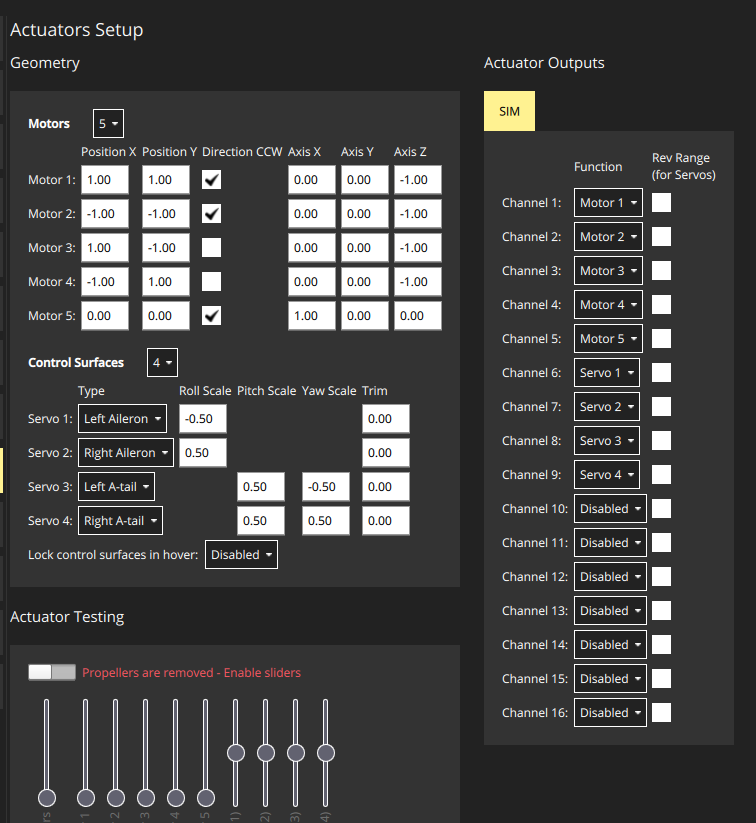
I am not using default babyshark servo outputs for some reason when rotors are in 5678 some of the rotors doesn’t spin but pusher spins. Ailerons, ruddervators, outpust doesn’t work also using default babyshark indexes.
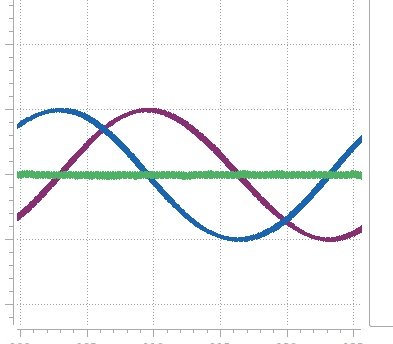
I checked the gazebo rotor_puller angular velocity plot;
I was expected it to be green one (z axis) stable around 0 as it is in the plot, blue one(x axis) stable around some value -55 etc and purple one (y axis) same as z axis around 0. However, it seems like in my model there exists angular velocity both in x and y direction. Values change between -+40 in this plot. Any suggestions?
Fixed it.
[x, y, z ,roll, pitch, yaw]
pitch angle was 0 radian made it 1.57078 which is 90 degree(it used to be same rotation as multicopter blades), in the model visual puller was already vertical. Changing sdf file rotation doesn’t have any effect on the model so i didn’t consider it before since it was already looking vertical.